

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
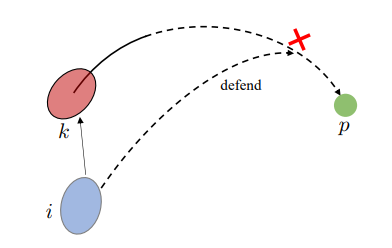
Target defense in 2 D . In Figure 1 , an adversarial robot k ( red ) is approaching target p . The defense robot
Target defense in D In Figure an adversarial robot k red is approaching target p The defense robot i aims to intercept the adversarial robot before it reaches the target. Both robots have differential
drive dynamics and the state is denoted by x ytheta
point. What sensorsmeasurements are required for this task?
points. Using these measurements, estimate the velocity of the red robot, and then predict its trajectory. Write down the derivations in detail.
points. With the predicted trajectory, design a controller for the blue robot to intercept the red robot. Write down the derivations in detail.
You dont have to consider any uncertainties or noises and feel free to use any other notions.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Databases A Beginners Guide
Authors: Andy Oppel
1st Edition
007160846X, 978-0071608466