

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
The A, B, C, and D matrices for the cart-pendulum system, with the following state definitions, 21 = Ic X2 = Ic 23 =
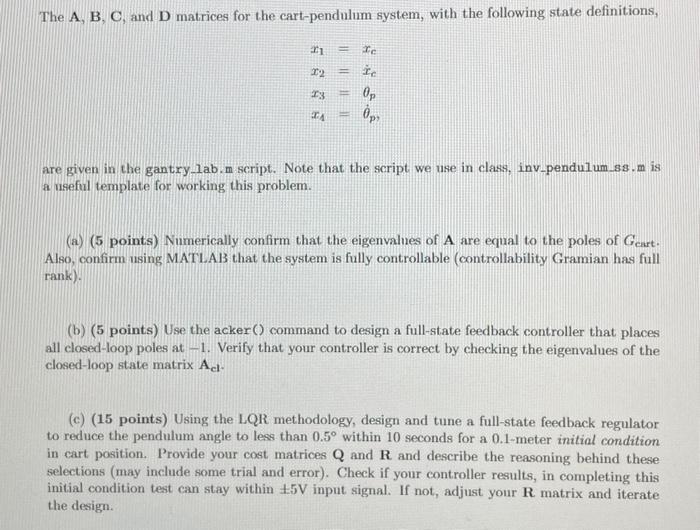
The A, B, C, and D matrices for the cart-pendulum system, with the following state definitions, 21 = Ic X2 = Ic 23 = Op IA = 0p are given in the gantry_lab.m script. Note that the script we use in class, inv-pendulum_ss.m is a useful template for working this problem. (a) (5 points) Numerically confirm that the eigenvalues of A are equal to the poles of Geart. Also, confirm using MATLAB that the system is fully controllable (controllability Gramian has full rank). (b) (5 points) Use the acker() command to design a full-state feedback controller that places all closed-loop poles at -1. Verify that your controller is correct by checking the eigenvalues of the closed-loop state matrix Act- (c) (15 points) Using the LQR methodology, design and tune a full-state feedback regulator to reduce the pendulum angle to less than 0.5 within 10 seconds for a 0.1-meter initial condition in cart position. Provide your cost matrices Q and R. and describe the reasoning behind these selections (may include some trial and error). Check if your controller results, in completing this initial condition test can stay within 15V input signal. If not, adjust your R. matrix and iterate the design.
Step by Step Solution
★★★★★
3.47 Rating (157 Votes )
There are 3 Steps involved in it
Step: 1
a To numerically confirm that the eigenvalues of A are equal to the poles of the system we can use the eig function in MATLAB to compute the eigenvalues of A and compare them with the poles of the sys...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
System Dynamics
Authors: William Palm III
3rd edition
73398063, 978-0073398068