

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
The drawback of angle-axis representation can be overcome by 4- parameter representation, i.e. unit quaternion, defined by Q={n, e) where the scalar 0 0
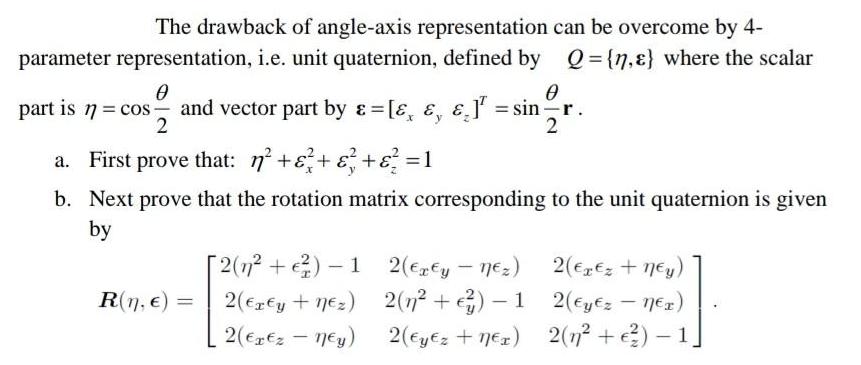
The drawback of angle-axis representation can be overcome by 4- parameter representation, i.e. unit quaternion, defined by Q={n, e) where the scalar 0 0 part is n = cos and vector part by & = [&, &, &] =sin-r. 2 2 a. First prove that: n+&+&+ = 1 b. Next prove that the rotation matrix corresponding to the unit quaternion is given by R(n, e) = [2(n + ) - 1 2(ry + nez) 2(Exez-ney) 2(Exty - nez) 2(n + ) - 2(Eyez+nex) 2(x +ney) 2(Eyz - Nex) 2(n + ) - 1
Step by Step Solution
★★★★★
3.37 Rating (150 Votes )
There are 3 Steps involved in it
Step: 1
a To prove that n x y z 1 we can start with the definition of the unit quaternion Q n x y z Since Q ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Introduction to Algorithms
Authors: Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest
3rd edition
978-0262033848