

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
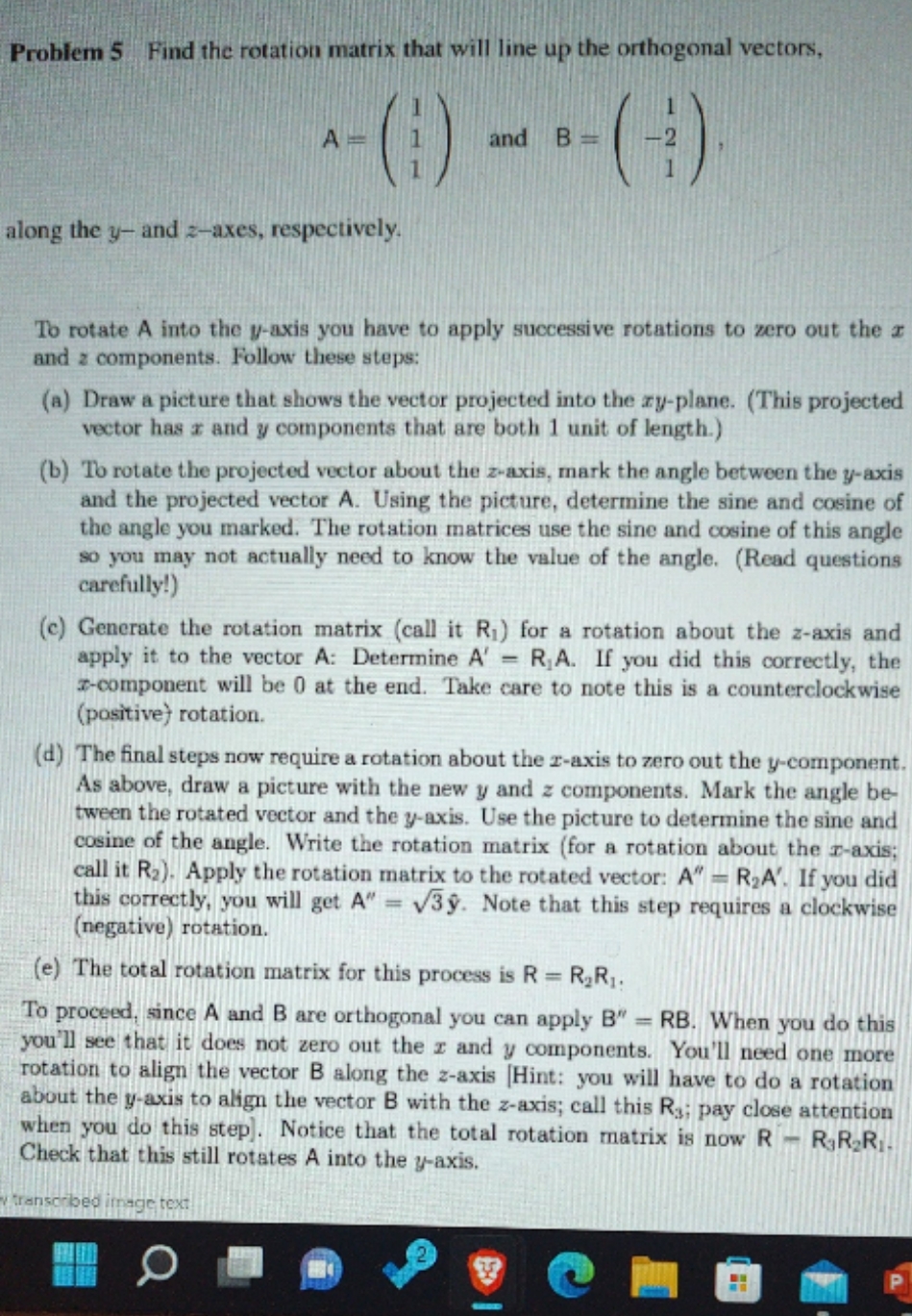
trying to make sure that I calculation is correct and my graph too Problem 5 Find the rotation matrix that will line up the orthogonal
trying to make sure that I calculation is correct and my graph too
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
A First Course in Differential Equations with Modeling Applications
Authors: Dennis G. Zill
10th edition
978-1111827052