

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
use matlab code Use the Matlab/Simulink to demonstrate the control algorithm. (A) Construct a subsystem block 'robotic manipulator' in Simulink for (1). with m1=1,m2=0.6,l1=1,l2=0.8,J1=J2=0.005,g=9.8. You
use matlab code
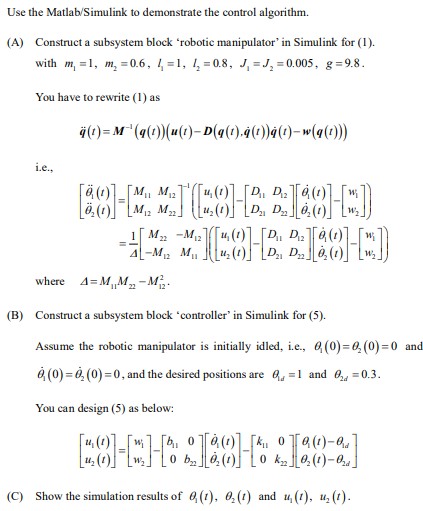 Use the Matlab/Simulink to demonstrate the control algorithm. (A) Construct a subsystem block 'robotic manipulator' in Simulink for (1). with m1=1,m2=0.6,l1=1,l2=0.8,J1=J2=0.005,g=9.8. You have to rewrite (1) as q(t)=M1(q(t))(u(t)D(q(t),q(t))q(t)w(q(t))) i.e., [1(t)2(t)]=[M11M12M12M22]1([u1(t)u2(t)][D11D21D12D22][1(t)2(t)][w1w2])=1[M22M12M12M11]([u1(t)u2(t)][D11D21D12D22][1(t)2(t)][w1w2]) where =M11M22M122. (B) Construct a subsystem block 'controller' in Simulink for (5). Assume the robotic manipulator is initially idled, i.e., 1(0)=2(0)=0 and 1(0)=2(0)=0, and the desired positions are ld=1 and 2d=0.3. You can design (5) as below: [u1(t)u2(t)]=[w1w2][b1100b22][1(t)2(t)][k1100k22][1(t)1d2(t)2d] (C) Show the simulation results of 1(t),2(t) and u1(t),u2(t)
Use the Matlab/Simulink to demonstrate the control algorithm. (A) Construct a subsystem block 'robotic manipulator' in Simulink for (1). with m1=1,m2=0.6,l1=1,l2=0.8,J1=J2=0.005,g=9.8. You have to rewrite (1) as q(t)=M1(q(t))(u(t)D(q(t),q(t))q(t)w(q(t))) i.e., [1(t)2(t)]=[M11M12M12M22]1([u1(t)u2(t)][D11D21D12D22][1(t)2(t)][w1w2])=1[M22M12M12M11]([u1(t)u2(t)][D11D21D12D22][1(t)2(t)][w1w2]) where =M11M22M122. (B) Construct a subsystem block 'controller' in Simulink for (5). Assume the robotic manipulator is initially idled, i.e., 1(0)=2(0)=0 and 1(0)=2(0)=0, and the desired positions are ld=1 and 2d=0.3. You can design (5) as below: [u1(t)u2(t)]=[w1w2][b1100b22][1(t)2(t)][k1100k22][1(t)1d2(t)2d] (C) Show the simulation results of 1(t),2(t) and u1(t),u2(t) Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Data Analysis And Signal Processing In Chromatography
Authors: A. Felinger
1st Edition
0444820663, 978-0444820662