

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
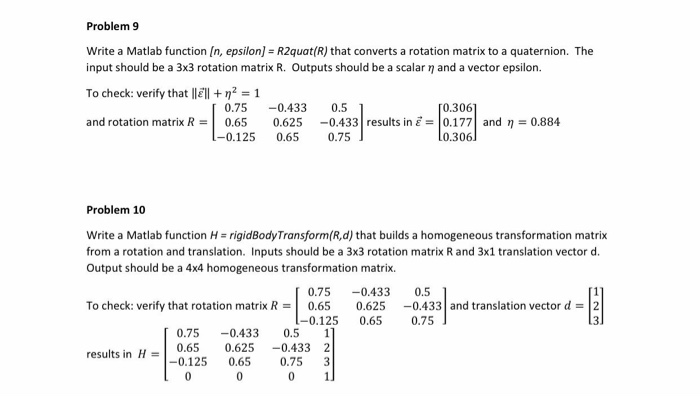
Using matlab Problem 9 Write a Matlab function [n, epsilon] - R2quat(R) that converts a rotation matrix to a quaternion. The input should be a
Using matlab
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Harness The Power Of Big Data The IBM Big Data Platform
Authors: Paul Zikopoulos, David Corrigan James Giles Thomas Deutsch Krishnan Parasuraman Dirk DeRoos Paul Zikopoulos
1st Edition
0071808183, 9780071808187