

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
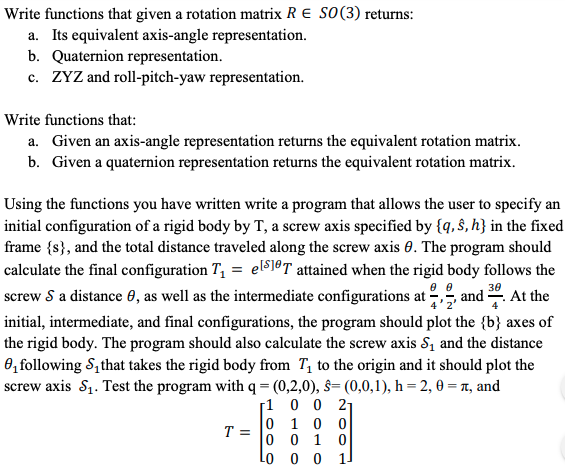
Using MATLAB: Write functions that given a rotation matrix R E SO(3) returns: a. Its equivalent axis-angle representation. b. Quaternion representation. c. ZYZ and roll-pitch-yaw
Using MATLAB:
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
MySQL/PHP Database Applications
Authors: Brad Bulger, Jay Greenspan, David Wall
2nd Edition
0764549634, 9780764549632