

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
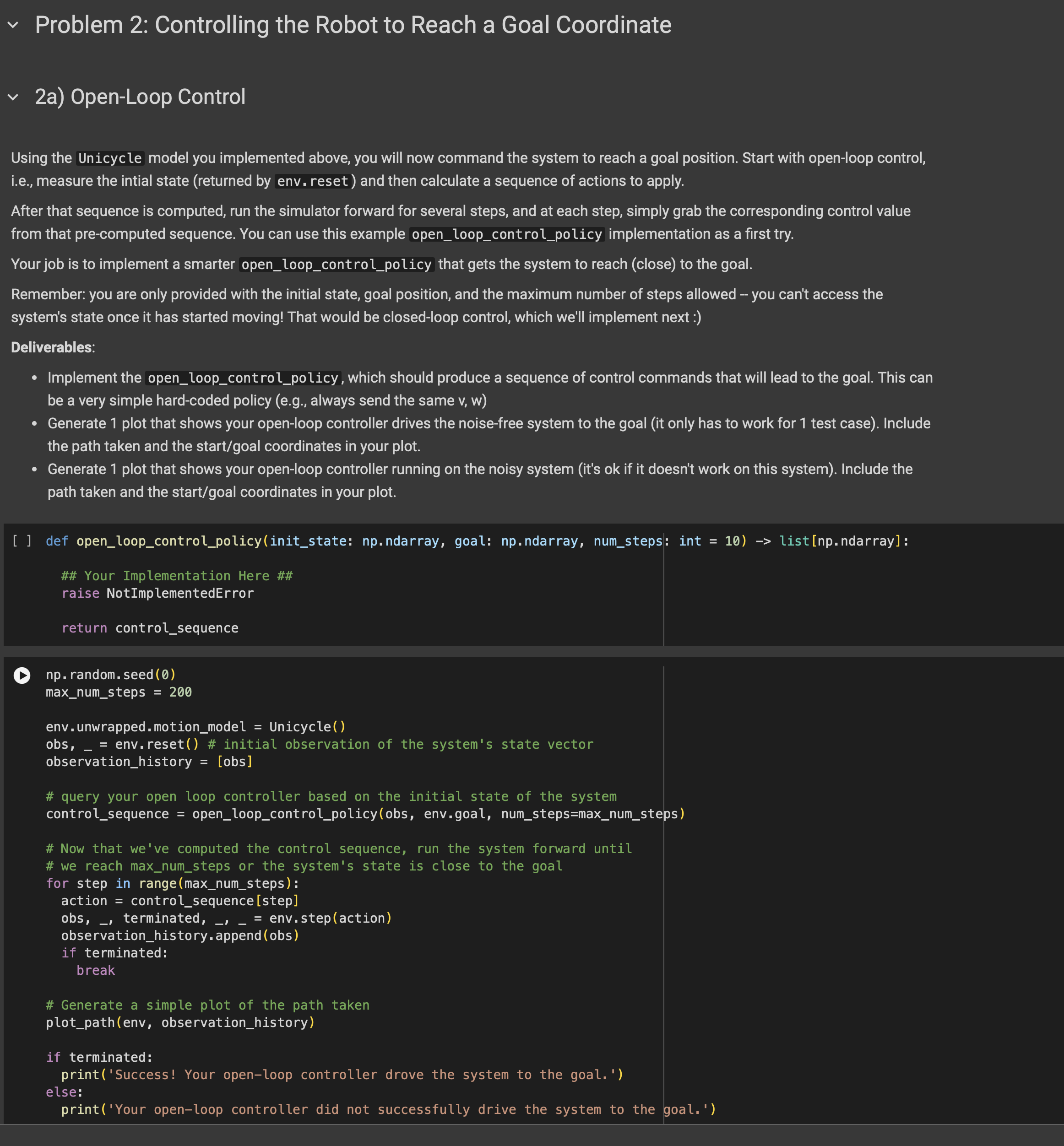
Using the Unicycle model you implemented above, you will now command the system to reach a goal position. Start with open - loop control, i
Using the Unicycle model you implemented above, you will now command the system to reach a goal position. Start with openloop control,
ie measure the intial state returned by env. reset and then calculate a sequence of actions to apply.
After that sequence is computed, run the simulator forward for several steps, and at each step, simply grab the corresponding control value
from that precomputed sequence. You can use this example openloopcontrolpolicy implementation as a first try.
Your job is to implement a smarter openloopcontrolpolicy that gets the system to reach close to the goal.
Remember: you are only provided with the initial state, goal position, and the maximum number of steps allowed you can't access the
system's state once it has started moving! That would be closedloop control, which we'll implement next
Deliverables:
Implement the openloopcontrolpolicy, which should produce a sequence of control commands that will lead to the goal. This can
be a very simple hardcoded policy eg always send the same
Generate plot that shows your openloop controller drives the noisefree system to the goal it only has to work for test case Include
the path taken and the startgoal coordinates in your plot.
Generate plot that shows your openloop controller running on the noisy system its ok if it doesn't work on this system Include the
path taken and the startgoal coordinates in your plot.
def openloopcontrolpolicyinitstate: npndarray, goal: npndarray, numsteps: int listnpndarray:
## Your Implementation Here ##
raise NotImplementedError
return controlsequence
nprandom.seed
maxnumsteps
env. unwrapped.motionmodel Unicycle
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Introduction To Constraint Databases
Authors: Peter Revesz
1st Edition
1441931554, 978-1441931559