

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
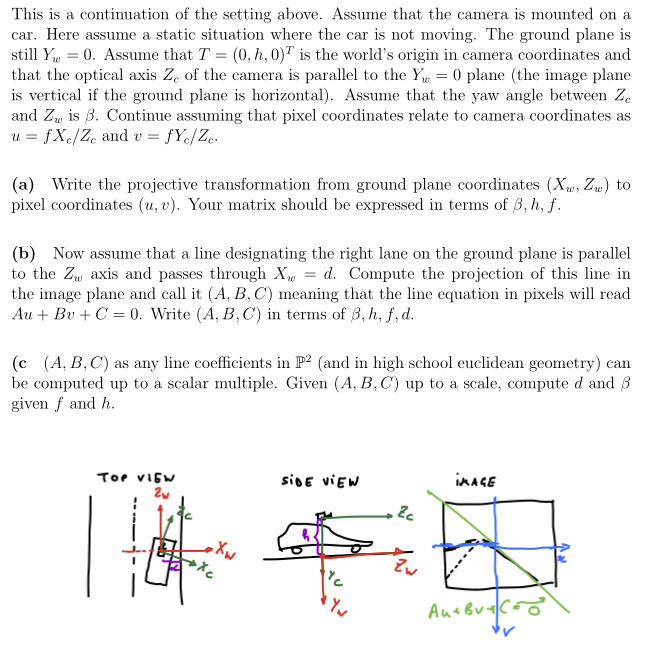
XcYcZc=RXwYwZw+T. This is a continuation of the setting above. Assume that the camera is mounted on a car. Here assume a static situation where the
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Database And Expert Systems Applications Dexa 2023 Workshops 34th International Conference Dexa 2023 Penang Malaysia August 28 30 2023 Proceedings
Authors: Gabriele Kotsis ,A Min Tjoa ,Ismail Khalil ,Bernhard Moser ,Atif Mashkoor ,Johannes Sametinger ,Maqbool Khan
1st Edition
303139688X, 978-3031396885