

Refer to The International Journal of Robotics Research (Dec. 2004) algorithm for estimating the sensor motion of
Question:
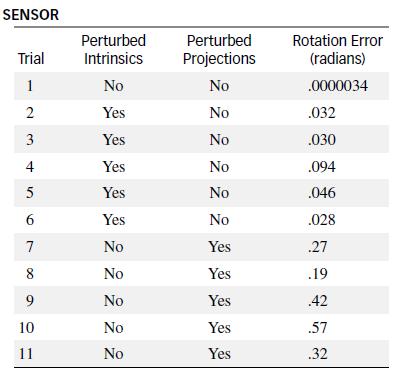
Refer to The International Journal of Robotics Research (Dec. 2004) algorithm for estimating the sensor motion of a robotic arm, Exercise 2.64. A key variable is the error of estimating arm rotation (measured in radians). Data on rotation error for 11 experiments with different combinations of perturbed intrinsic and perturbed projections are reproduced in the table. Suppose the rotation error variance is important and the researchers want to compare the variances for different intrinsic and projections. In particular, they want an estimate of the ratio of the variance for trials with perturbed intrinsic but no perturbed projections, to the variance for trials with no perturbed intrinsic but perturbed projections. Use a 90% confidence interval to estimate the desired parameter.
Data from Exercise 2.64
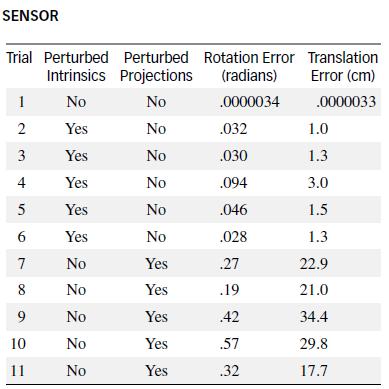
Researchers at Carnegie Mellon University developed an algorithm for estimating the sensor motion of a robotic arm by mounting a camera with inertia sensors on the arm. (The International Journal of Robotics Research, Dec. 2004.) Two variables of interest were the error of estimating arm rotation (measured in radians) and the error of estimating arm translation (measured in centimeters). Data for 11 experiments are listed in the table. In each experiment, the perturbation of camera intrinsic and projections were varied.
Step by Step Answer:


Statistics For Engineering And The Sciences
ISBN: 9781498728850
6th Edition
Authors: William M. Mendenhall, Terry L. Sincich
