

Consider the mechanical dynamic system in Figure 2.40 where the movement of a large object is controlled
Question:
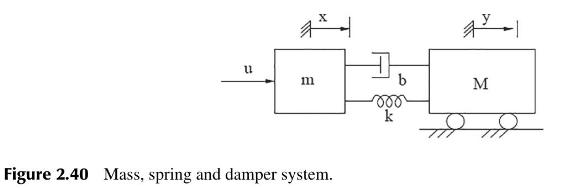
Consider the mechanical dynamic system in Figure 2.40 where the movement of a large object is controlled by manipulating a much smaller object that is mechanically coupled with it. A force \(u(t)\) is applied to the small mass \(\mathbf{m}\) in order to position the larger mass \(\mathbf{M}\). The coupling between the objects is modelled by a spring constant \(\mathbf{k}\) with a damping coefficient \(\mathbf{b}\). Find the State-Variable Matrix model of the system.
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:
Two freebody diagrams ...View the full answer

Answered By
Jinah Patricia Padilla
Had an experience as an external auditor in Ernst & Young Philippines and currently a Corporate Accountant in a consultancy company providing manpower to a 5-star hotel in Makati, Philippines, Makati Diamond Residences
120+ Reviews
150+ Question Solved
Related Book For 

Design And Analysis Of Control Systems Driving The Fourth Industrial Revolution
ISBN: 9781032718804
2nd Edition
Authors: Arthur G O Mutambara
Question Posted:
