

In some mechanical positioning systems, the movement of a large object is controlled by manipulating a much
Question:
In some mechanical positioning systems, the movement of a large object is controlled by manipulating a much smaller object that is mechanically coupled with it. The following diagram depicts such a system, where a force \(u(t)\) is applied to a small mass \(m\) to position a larger mass \(M\). The coupling between the objects is modelled by a spring constant with a damping coefficient \(b\).
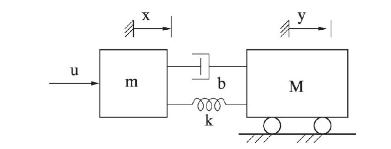
(a) Draw the free-body diagrams of the system.
(b) Write the equations of motion governing this system.
(c) Identify the appropriate state variables and express the equations of motion in the StateVariable Matrix model \((A, B, C, D)\).
Step by Step Answer:

This question has not been answered yet.
You can Ask your question!
Related Book For 

Design And Analysis Of Control Systems Driving The Fourth Industrial Revolution
ISBN: 9781032718804
2nd Edition
Authors: Arthur G O Mutambara
Question Posted:
