

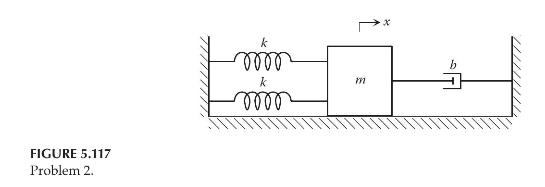
Repeat Problem 1 for the mass-spring-damper system shown in Figure 5.117, in which the origin of the
Question:
Repeat Problem 1 for the mass-spring-damper system shown in Figure 5.117, in which the origin of the coordinate \(x\) is set at equilibrium. Assume that \(x(0)=0.1 \mathrm{~m}\) and \(\dot{x}(0)=0 \mathrm{~m} / \mathrm{s}\). The parameter values are \(m=20 \mathrm{~kg}, b=125 \mathrm{~N}\) \(\mathrm{s} / \mathrm{m}\), and \(k=400 \mathrm{~N} / \mathrm{m}\).
Data From Problem 1:
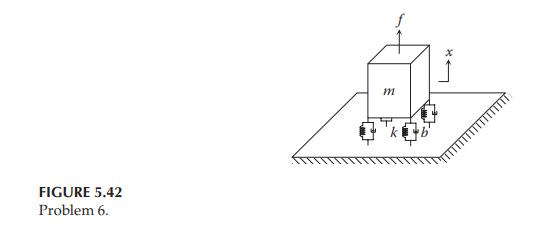
Consider the mass-spring-damper system in Problem 6 of Problem Set 5.2. Assume that the force acting on the mass block is a unit-impulse function with a magnitude of \(100 \mathrm{~N}\) and a duration of \(0.1 \mathrm{sec}\). The parameter values are \(m=500 \mathrm{~kg}, b=250 \mathrm{~N} \cdot \mathrm{s} / \mathrm{m}\), and \(k=200,000 \mathrm{~N} / \mathrm{m}\).
Data From Problem 6 of Problem Set 5.2:
The system shown in Figure 5.42 simulates a machine supported by rubbers, which are approximated as four identical spring–damper units. The input is the force f and the output is the displacement x of the mass. The parameter values are m = 500 kg, b = 250 N·s/m, and k = 200,000 N/m.
Step by Step Answer:


Modeling And Analysis Of Dynamic Systems
ISBN: 9781138726420
3rd Edition
Authors: Ramin S. Esfandiari, Bei Lu
