

Consider the satellite described in Problem 11.4-8. The plant model is given as The plant disturbances are
Question:
Consider the satellite described in Problem 11.4-8. The plant model is given as![= [1 ]x) + x(k) y(k)= [10]x(k) + (k) x(k + 1) [0.11 Ju(k) + [0.02] 0.2 w(k)](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1705/6/4/7/34765aa1cf3c400e1705647346075.jpg)
The plant disturbances are caused by random variations in the Earth’s gravity field. Suppose that Rw = 1 and Rv = 0.02.
(a) The measurement y(k) is in the units of angular degrees and is obtained from a stable platform. Describe the accuracy of this measurement; that is, what does the value of Rv tell us about the sensor accuracy?
(b) Calculate and plot the Kalman gains, as in Fig. 11-5, using M(0) = I .
(c) The diagonal elements of the steady-state error covariance matrix are
Comment on the steady-state accuracy of this Kalman filter.
(d) The LQ design of Problem 11.4-8 yielded the steady-state gains of K = [0.51922.103]. Find the transfer function Dce(z) of the control estimator.
(e) Calculate and plot the Nyquist diagram for the closed-loop system opened at the plant input. What are the phase and gain margins?
Problem 11.4-8
Consider the third-order continuous-time LTI system![with A = 208 0 0 0 3 0 -8 -6 x = Ax + Bu y = Cx 0 B = 0, and C= [1 0 0]. Using = 8 0 0 0 6 0 0 4 3 R = 1.5](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1705/6/4/6/01865aa17c25a3141705646016987.jpg)
Fig. 11-5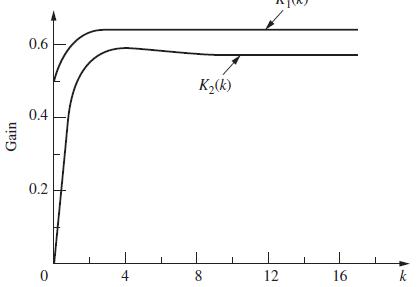
Step by Step Answer:
Part a Part b Part c Part d Part e The value of Rv in the context of a ...View the full answer



Digital Control System Analysis And Design
ISBN: 9780132938310
4th Edition
Authors: Charles Phillips, H. Nagle, Aranya Chakrabortty
