

Suppose that a plant is described by (a) Design a Kalman filter for this system. Continue the
Question:
Suppose that a plant is described by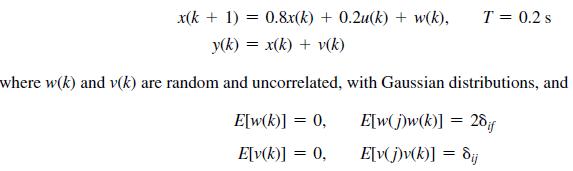
(a) Design a Kalman filter for this system. Continue the gain calculations until the gain is approximately constant. Use M(0) = 2.
(b) In part (a), we specified M(0) = 2. What are we stating about our estimate of the state x(0) ?
(c) Write the difference equations for the steady-state Kalman filter, as in part (a).
(d) Suppose that an LQ design is performed for this plant, with the resulting gain K = 0.2197. Find the control-estimator transfer function (see Fig. 9-8) for this IH-LQG design.
(e) Find the closed-loop system characteristic equation for part (d).
(f) Find the closed-loop system time constants.
(g) Suppose that the state x(k) is estimated to be 90.1 by the Kalman filter at a certain time kT. Give the three-sigma range about the value 90.1 that will almost certainly contain the true value of x(k) at that time kT.
(h) Find the system phase and gain margins.
Step by Step Answer:
It looks like youve posted a multipart control systems and estimation question pertaining to Kalman filters and Linear Quadratic Gaussian LQG control The system youve described is a discretetime linea...View the full answer



Digital Control System Analysis And Design
ISBN: 9780132938310
4th Edition
Authors: Charles Phillips, H. Nagle, Aranya Chakrabortty
