

Question: 1.11 The robot shown in Figure P 1.11 has the differential equations of motion given. Symbols m1 ,~,11 ,12,1 , and g are constant parameters,
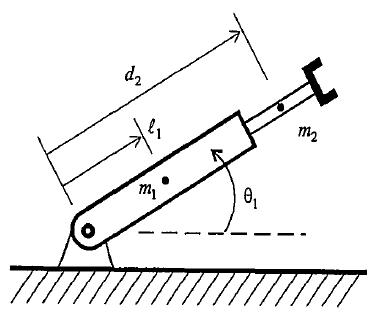
1.11 The robot shown in Figure P 1.11 has the differential equations of motion given. Symbols m1 ,~,11 ,12,£1 , and g are constant parameters, representing the characteristics of the rigid body links. Quantities 81 and d2 are the coordinate variables and are functions of time. The Pl.Jl inputs are 1:1 and 1:2 . Linearize the two equations about the operating point 81 = S1 = S1 = 0, d2 = 3, and d2 = d2 = 0.
0 M //////////////////////
Step by Step Solution
There are 3 Steps involved in it
To linearize the two differential equations of motion about the given operating point follow these g... View full answer

Get step-by-step solutions from verified subject matter experts