

Question: (a) Using the process, sensor, and valve transfer functions in Exercise 11.21, find the ultimate controller gain K cu using a Bode plot. Using simulation,
(b) Next fit a FOPTD model to G and tune a PI controller for a set-point change. What is the gain margin for the controller?
Function From Exercise 11.21,
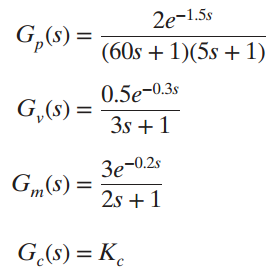
2e-1.5s G,(6) = (60s + 1)(5s + 1) 0.5e-0.3s G,(s) = 3s +1 -0.25 G(8): 2s + 1 G_(s) = K.
Step by Step Solution
★★★★★
3.45 Rating (164 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

a c occurs where 180 c 0152 AR c 0227 Simulation results with different Kc are sh... View full answer
Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock