

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
1. In terms of the s, s, 2s coordinates of a fixed space frame (s), the frame {a} has its a-axis pointing in the
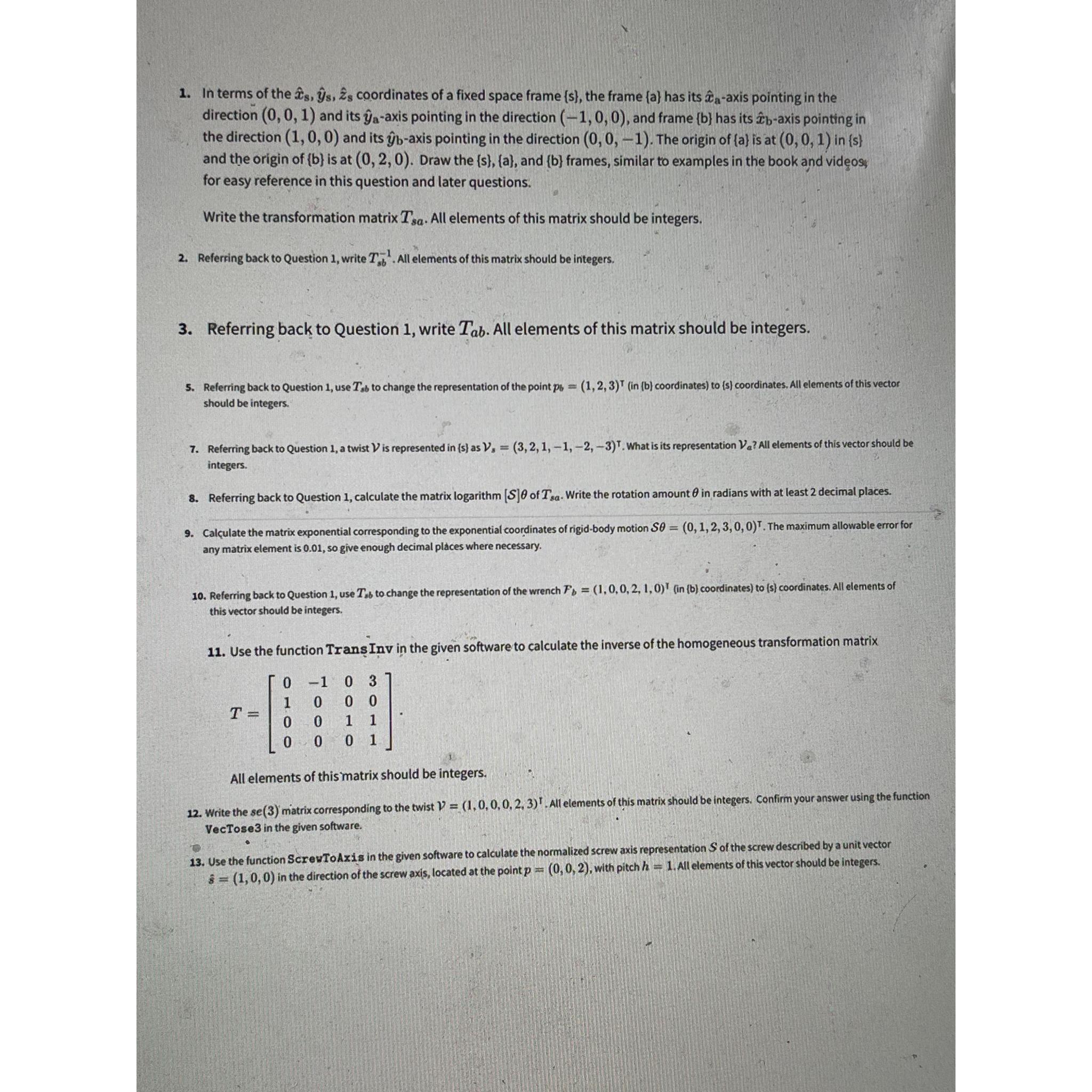
1. In terms of the s, s, 2s coordinates of a fixed space frame (s), the frame {a} has its a-axis pointing in the direction (0, 0, 1) and its a-axis pointing in the direction (-1, 0, 0), and frame {b} has its b-axis pointing in the direction (1,0,0) and its b-axis pointing in the direction (0, 0, -1). The origin of (a) is at (0, 0, 1) in {s} and the origin of (b) is at (0, 2, 0). Draw the {s}, {a}, and {b} frames, similar to examples in the book and videos for easy reference in this question and later questions. Write the transformation matrix Tsa. All elements of this matrix should be integers. 2. Referring back to Question 1, write T. All elements of this matrix should be integers. 3. Referring back to Question 1, write Tab. All elements of this matrix should be integers. 5. Referring back to Question 1, use Tab to change the representation of the point p = (1,2,3)T (in (b) coordinates) to (s) coordinates. All elements of this vector should be integers. 7. Referring back to Question 1, a twist V is represented in (s) as V, = (3,2,1,-1,-2,-3)T. What is its representation Va? All elements of this vector should be integers. 8. Referring back to Question 1, calculate the matrix logarithm [S]e of Ta Write the rotation amount 0 in radians with at least 2 decimal places. 9. Calculate the matrix exponential corresponding to the exponential coordinates of rigid-body motion S0 = (0, 1, 2, 3, 0, 0)T. The maximum allowable error for any matrix element is 0.01, so give enough decimal places where necessary. 10. Referring back to Question 1, use Tab to change the representation of the wrench F = (1,0,0,2, 1,0) (in (b) coordinates) to (s) coordinates. All elements of this vector should be integers. 11. Use the function Trans Inv in the given software to calculate the inverse of the homogeneous transformation matrix 0 -1 0 3 1 0 0 0 T 0 0 1 1 0 0 0 1 All elements of this matrix should be integers. 12. Write the se(3) matrix corresponding to the twist = (1,0,0,0, 2, 3). All elements of this matrix should be integers. Confirm your answer using the function VecTose3 in the given software. 13. Use the function ScrewToAxis in the given software to calculate the normalized screw axis representation S of the screw described by a unit vector = 1. All elements of this vector should be integers. =(1,0,0) in the direction of the screw axis, located at the point p = (0,0,2), with pitch h
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Shigleys Mechanical Engineering Design
Authors: Richard G. Budynas, J. Keith Nisbett
9th edition
77679520, 73529281, 1259986241, 978-0077679521, 9780073529288, 9781259986246, 978-1121345317