

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
= 2. [15pt] Consider a constant speed control with the desired trajectory specified by od [t, 0]; = [1,0], and = 0. Assume that
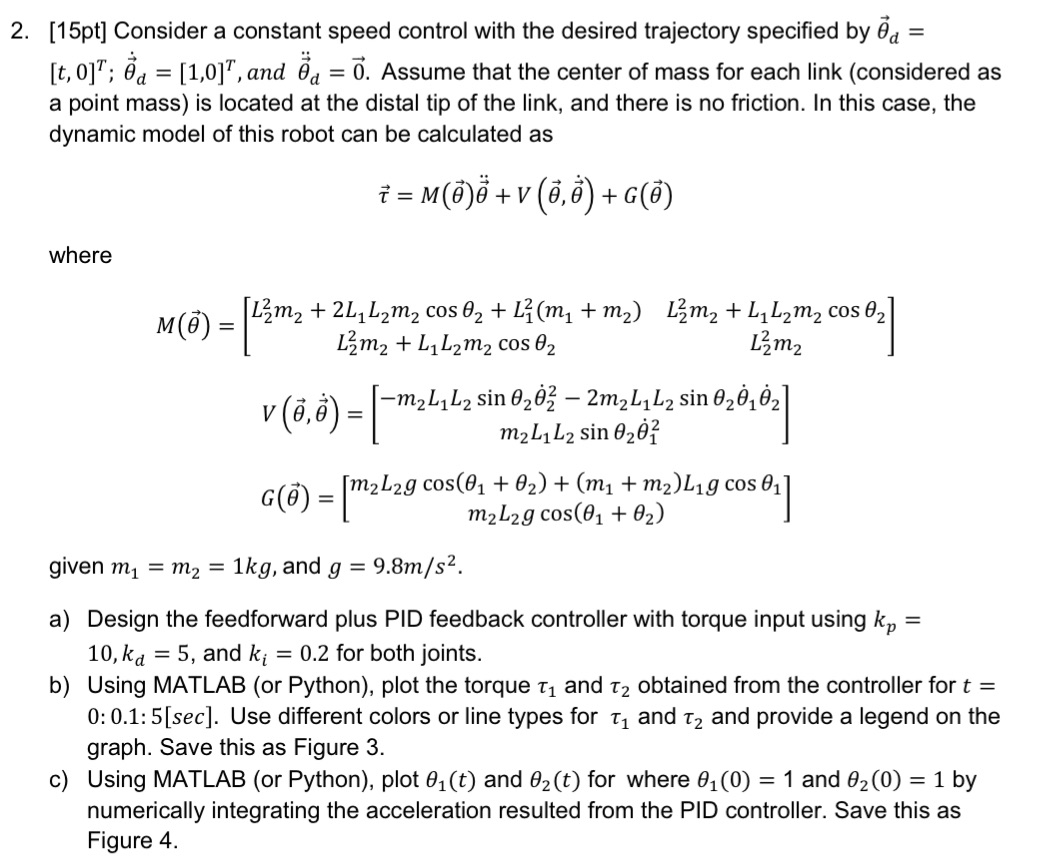
= 2. [15pt] Consider a constant speed control with the desired trajectory specified by od [t, 0]; = [1,0], and = 0. Assume that the center of mass for each link (considered as a point mass) is located at the distal tip of the link, and there is no friction. In this case, the dynamic model of this robot can be calculated as V t = M(8) +v(,i) + G(8) [L2m2 + 2L1L2m2 cos 0 + L (m + m) L m + LLm cos Lmz + L-Lzm2 cos 02 where M(0) = [1 m L2m cos My v () = | 2 sin 0,0,0] [mLL2 sin 020 2mL sin 020 m2L1 L2 sin 020 G(0) = [mL29 cos(0 + 0) + (m + m2)L19 cos 0] given m m = 1kg, and g = 9.8m/s. m2L2g cos(01 +0) a) Design the feedforward plus PID feedback controller with torque input using kp 10, ka 5, and ki = 0.2 for both joints. = b) Using MATLAB (or Python), plot the torque and 2 obtained from the controller for t = 0:0.1:5[sec]. Use different colors or line types for and 2 and provide a legend on the graph. Save this as Figure 3. = 1 and 2 (0) = 1 by c) Using MATLAB (or Python), plot 01(t) and 02 (t) for where 01(0) numerically integrating the acceleration resulted from the PID controller. Save this as Figure 4.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Elements Of Chemical Reaction Engineering
Authors: H. Fogler
6th Edition
013548622X, 978-0135486221