

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
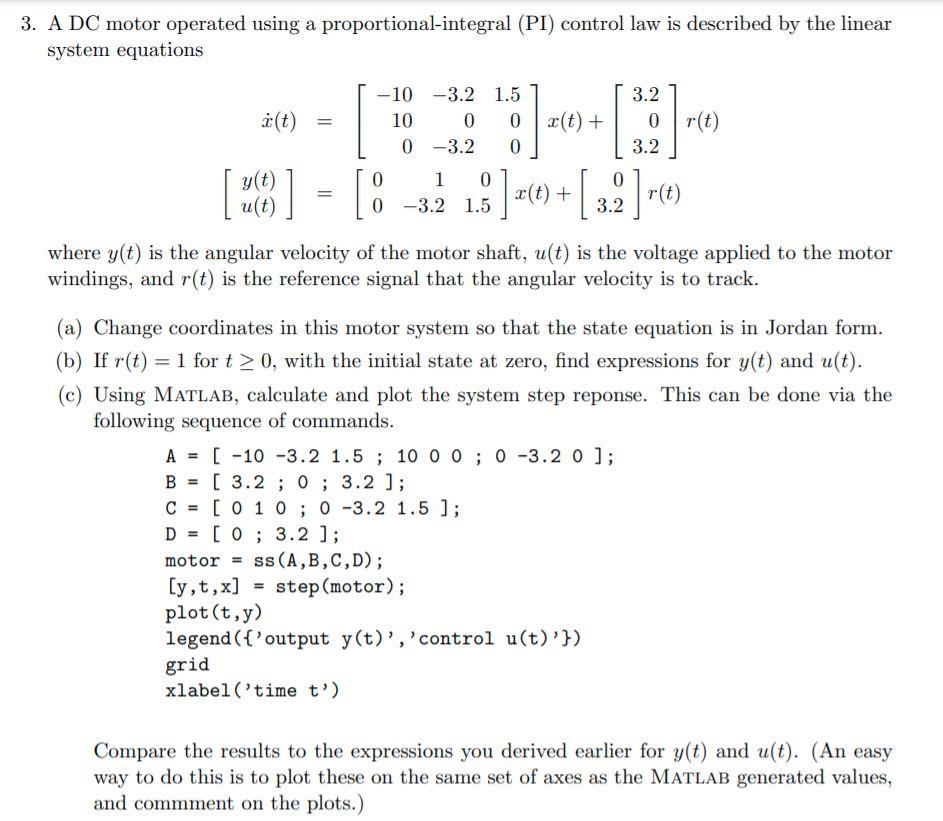
3. A DC motor operated using a proportional-integral (PI) control law is described by the linear system equations 3.2 i(t) -10 -3.2 1.5 10 0
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Practical Database Auditing For Microsoft SQL Server And Azure SQL Troubleshooting Regulatory Compliance And Governance
Authors: Josephine Bush
1st Edition
1484286332, 978-1484286333