

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
8.4 Imagine that we have a collection of blocks on a table and a robot arm that is capable of picking up blocks and
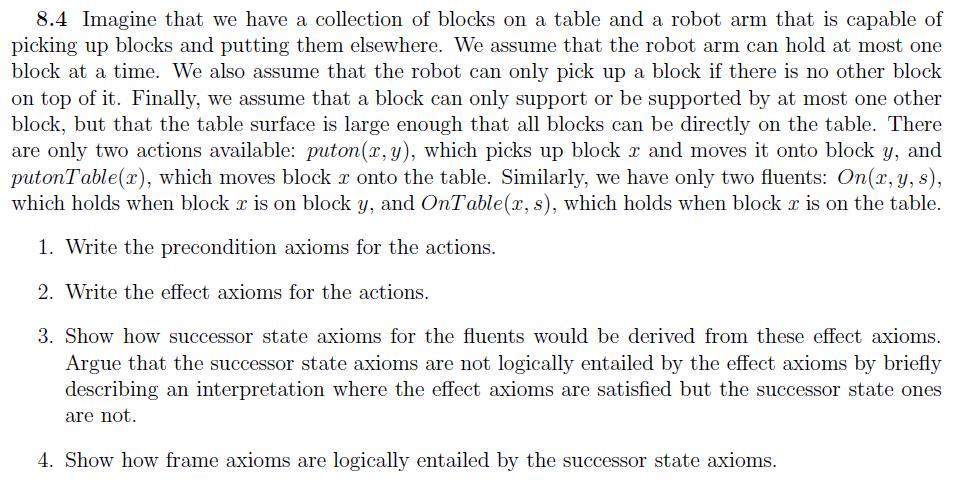
8.4 Imagine that we have a collection of blocks on a table and a robot arm that is capable of picking up blocks and putting them elsewhere. We assume that the robot arm can hold at most one block at a time. We also assume that the robot can only pick up a block if there is no other block on top of it. Finally, we assume that a block can only support or be supported by at most one other block, but that the table surface is large enough that all blocks can be directly on the table. There are only two actions available: puton(x, y), which picks up block x and moves it onto block y, and putonTable(x), which moves block x onto the table. Similarly, we have only two fluents: On(x, y, s), which holds when block r is on block y, and OnTable(x, s), which holds when block x is on the table. 1. Write the precondition axioms for the actions. 2. Write the effect axioms for the actions. 3. Show how successor state axioms for the fluents would be derived from these effect axioms. Argue that the successor state axioms are not logically entailed by the effect axioms by briefly describing an interpretation where the effect axioms are satisfied but the successor state ones are not. 4. Show how frame axioms are logically entailed by the successor state axioms.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Optics
Authors: Eugene Hecht
5th edition
133977226, 133979121, 978-0133977226