

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
A camera and a world coordinate frame are related as follows Xc +T. (+)-()+ Ye Z = RYw Zw (a) What is the origin
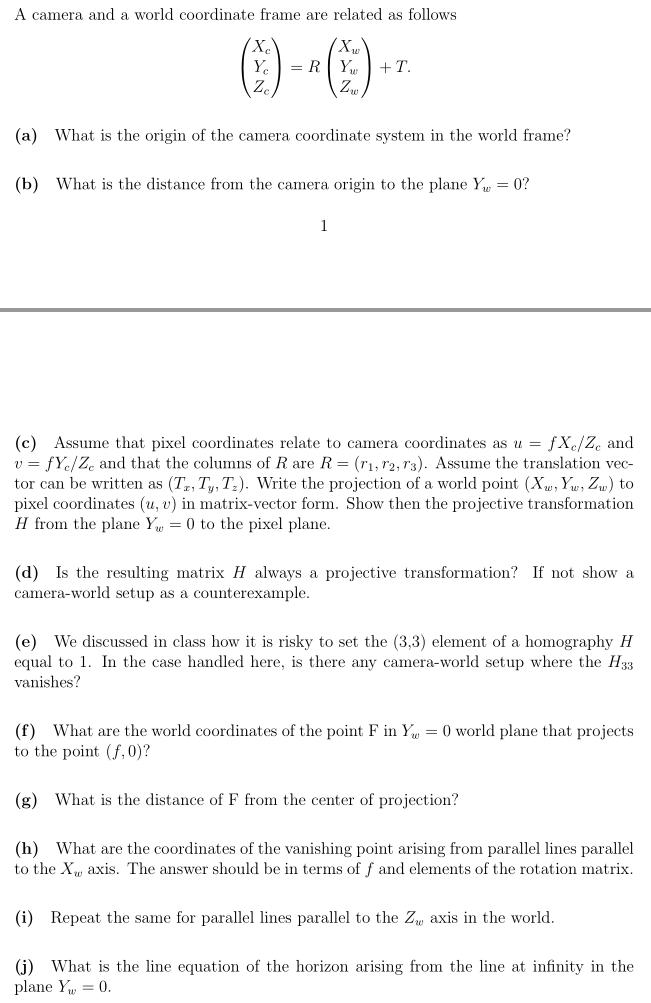
A camera and a world coordinate frame are related as follows Xc +T. (+)-()+ Ye Z = RYw Zw (a) What is the origin of the camera coordinate system in the world frame? (b) What is the distance from the camera origin to the plane Y = 0? 1 (c) Assume that pixel coordinates relate to camera coordinates as u = fXc/Zc and v=fY/Ze and that the columns of R are R = (r1, 12, 13). Assume the translation vec- tor can be written as (Tr, Ty, T2). Write the projection of a world point (X, Yw, Zw) to pixel coordinates (u, v) in matrix-vector form. Show then the projective transformation H from the plane Y = 0 to the pixel plane. (d) Is the resulting matrix H always a projective transformation? If not show a camera-world setup as a counterexample. (e) We discussed in class how it is risky to set the (3,3) element of a homography H equal to 1. In the case handled here, is there any camera-world setup where the H33 vanishes? (f) What are the world coordinates of the point F in Y = 0 world plane that projects to the point (f, 0)? (g) What is the distance of F from the center of projection? (h) What are the coordinates of the vanishing point arising from parallel lines parallel to the X axis. The answer should be in terms of f and elements of the rotation matrix. w (i) Repeat the same for parallel lines parallel to the Z axis in the world. (j) What is the line equation of the horizon arising from the line at infinity in the plane Y = 0.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Brock Biology of Microorganisms
Authors: Michael Madigan, John Martinko, Kelly Bender, Daniel Buckley
14th edition
978-0-321-8970, 321897390, 0-321-89707-2, 978-0321897398