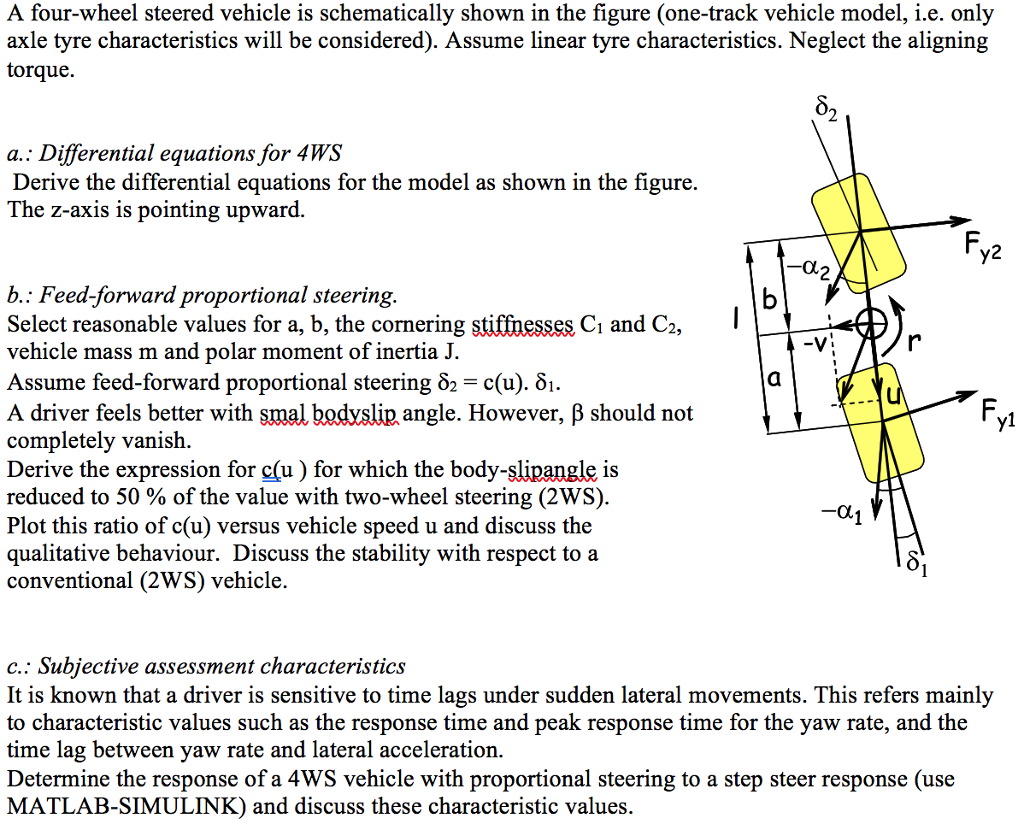
A four-wheel steered vehicle is schematically shown in the figure (one-track vehicle model, i.e. only axle tyre characteristics will be considered). Assume linear tyre characteristics. Neglect the aligning torque. a.: Differential equations for 4WS Derive the differential equations for the model as shown in the figure. The z-axis is pointing upward. b.: Feed-forward proportional steering Select reasonable values for a, b, the cornering stiffnesses C1 and C2, vehicle mass m and polar moment of inertia J Assume feed-forward proportional steering ,-o(u). 1. A driver feels better with smal bodyslip angle. However, should not completely vanish, Derive the expression for c(u) for which the body-slipangle is reduced to 50 % of the value with two-wheel steering (2WS) Plot this ratio of c(u) versus vehicle speed u and discuss the qualitative behaviour. Discuss the stability with respect to a conventional (2WS) vehicle c.: Subjective assessment characteristics It is known that a driver is sensitive to time lags under sudden lateral movements. This refers mainly to characteristic values such as the response time and peak response time for the yaw rate, and the time lag between yaw rate and lateral acceleration. Determine the response of a 4WS vehicle with proportional steering to a step steer response (use MATLAB-SIMULINK) and discuss these characteristic values. A four-wheel steered vehicle is schematically shown in the figure (one-track vehicle model, i.e. only axle tyre characteristics will be considered). Assume linear tyre characteristics. Neglect the aligning torque. a.: Differential equations for 4WS Derive the differential equations for the model as shown in the figure. The z-axis is pointing upward. b.: Feed-forward proportional steering Select reasonable values for a, b, the cornering stiffnesses C1 and C2, vehicle mass m and polar moment of inertia J Assume feed-forward proportional steering ,-o(u). 1. A driver feels better with smal bodyslip angle. However, should not completely vanish, Derive the expression for c(u) for which the body-slipangle is reduced to 50 % of the value with two-wheel steering (2WS) Plot this ratio of c(u) versus vehicle speed u and discuss the qualitative behaviour. Discuss the stability with respect to a conventional (2WS) vehicle c.: Subjective assessment characteristics It is known that a driver is sensitive to time lags under sudden lateral movements. This refers mainly to characteristic values such as the response time and peak response time for the yaw rate, and the time lag between yaw rate and lateral acceleration. Determine the response of a 4WS vehicle with proportional steering to a step steer response (use MATLAB-SIMULINK) and discuss these characteristic values