

Question
A mechanical engineer is designing a robotic arm that is intended to stop any defective crates on an assembly line. The crates travel horizontally across
A mechanical engineer is designing a robotic arm that is intended to stop any "defective" crates on an assembly line. The crates travel horizontally across a sequence of rollers and are to be modeled as point particles traveling on a horizontal, frictionless surface. The robotic arm must be able to bring a crate (mass m = 20 kg) traveling at the assembly line speed to rest within a distance of 25 m. Assume the robotic arm exerts upon a crate a constant force F, which makes an angle 0 = 30 below the horizontal a) What is the x component of the applied force F on the crate due to the robotic arm while the crate is being stopped?
b) Suppose the assembly line's speed is a bit scary at 10.0 m/s. What is the kinetic energy of the crate at t = 0, which is the instant the robotic arm first makes contact with the crate?
c) What is the change in the crate's kinetic energy for a time interval that begins at t 0 and ends when the crate just comes to rest at t = 5.00 s? d) What is the crate's kinetic energy when it is located at x = 20 m?
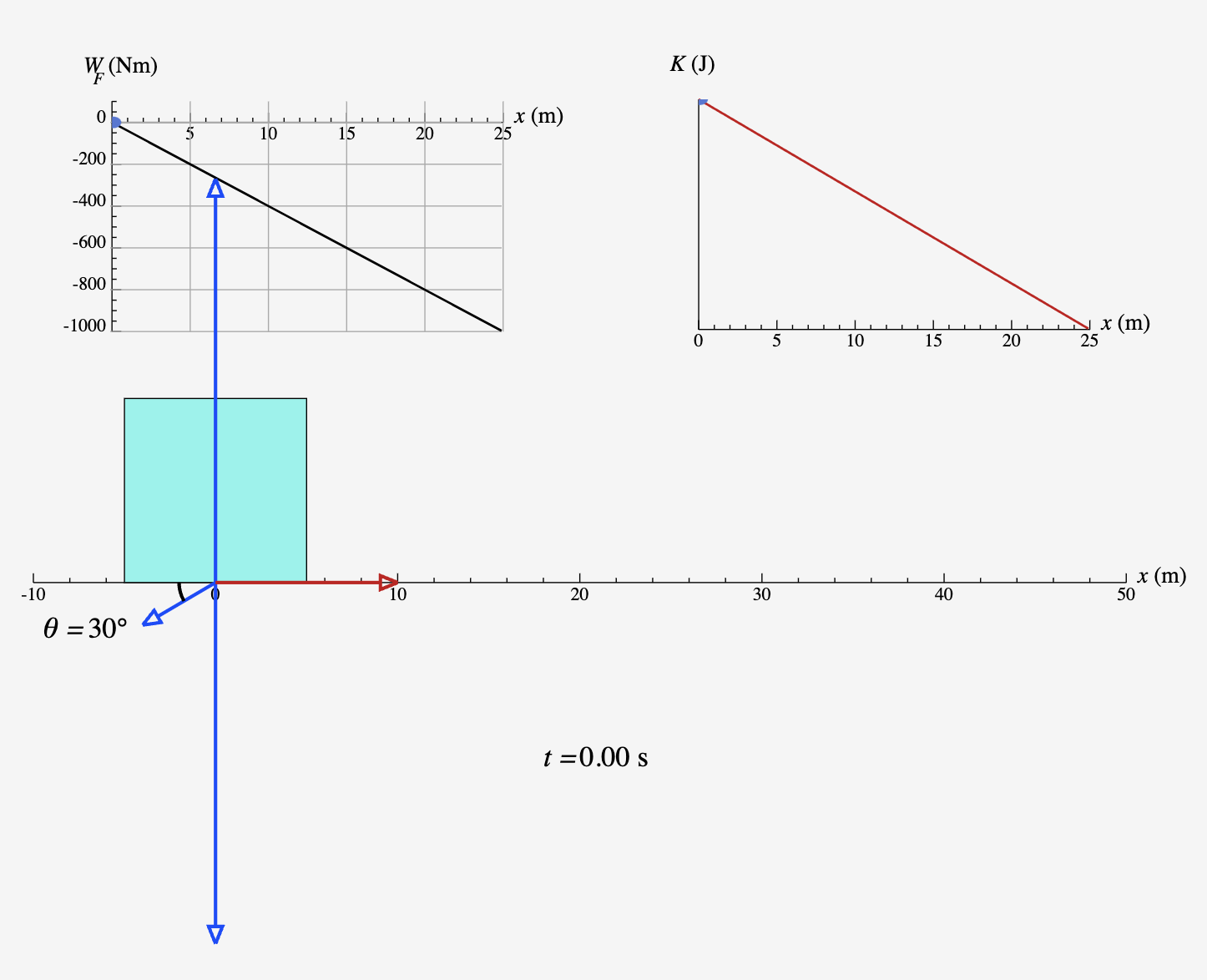
W(Nm) 0 -200 -400 -600 -800 -1000 -10 0 = 30 5 10 15 20 25 x (m) K (J) sx(m) 0 5 10 15 20 25 x (m) 20 30 40 50 t =0.00 s
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
International Marketing And Export Management
Authors: Gerald Albaum , Alexander Josiassen , Edwin Duerr
8th Edition
1292016922, 978-1292016924