

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
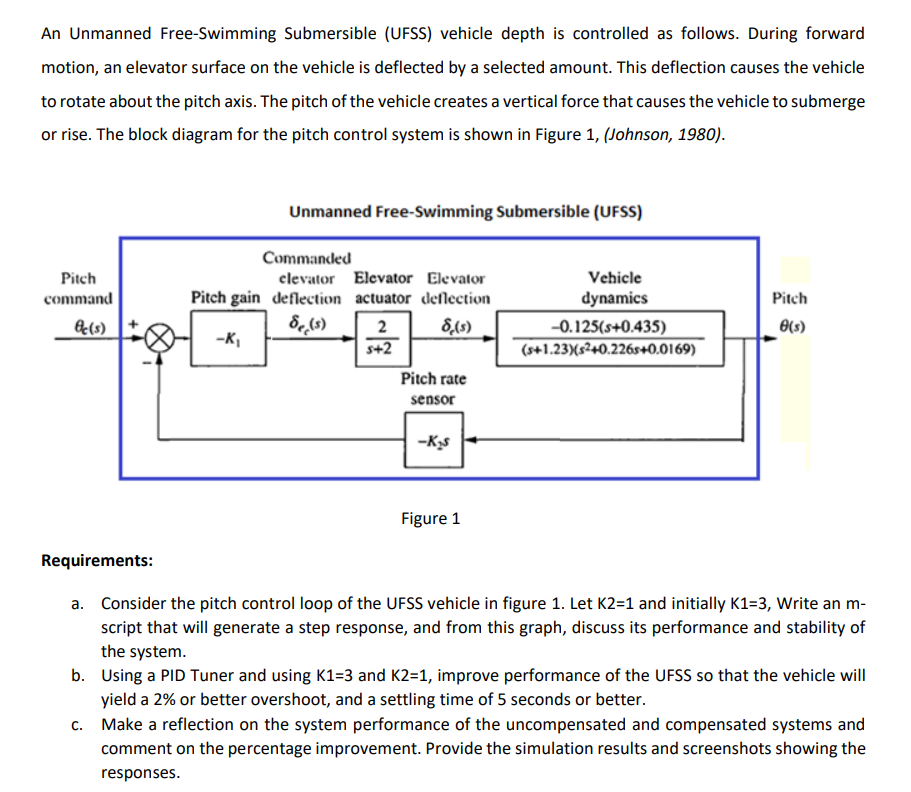
An Unmanned Free-Swimming Submersible (UFSS) vehicle depth is controlled as follows. During forward motion, an elevator surface on the vehicle is deflected by a selected
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Logidata+ Deductive Databases With Complex Objects Lncs 701
Authors: Paolo Atzeni
1st Edition
354056974X, 978-3540569749