

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
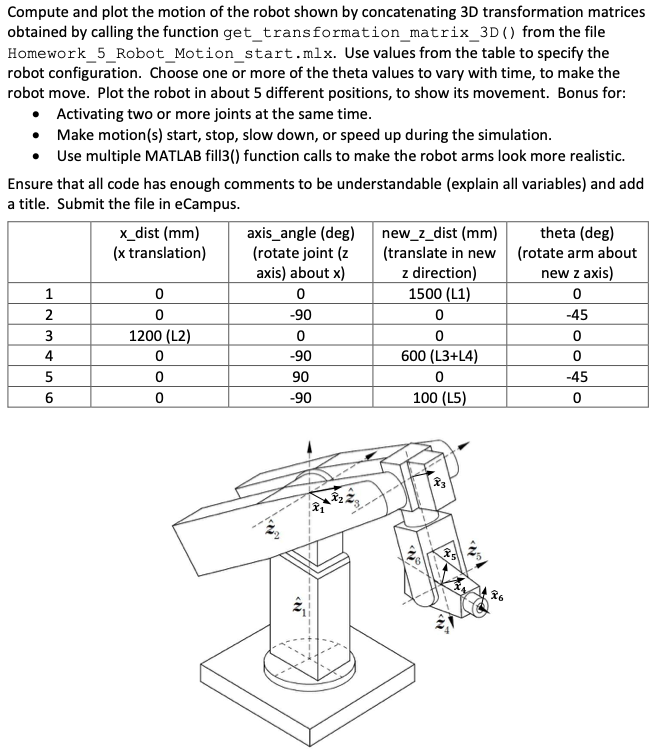
Code asked is MatLab code Compute and plot the motion of the robot shown by concatenating 3D transformation matrices obtained by calling the function get_transformation_matrix_3D()
Code asked is MatLab code
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Databases Illuminated
Authors: Catherine M. Ricardo, Susan D. Urban, Karen C. Davis
4th Edition
1284231585, 978-1284231588