

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Consider an RPR plannar robot shown in Figure Q6. The robotic system has three-degrees of freedom; the joint variables are 0, d and 03.

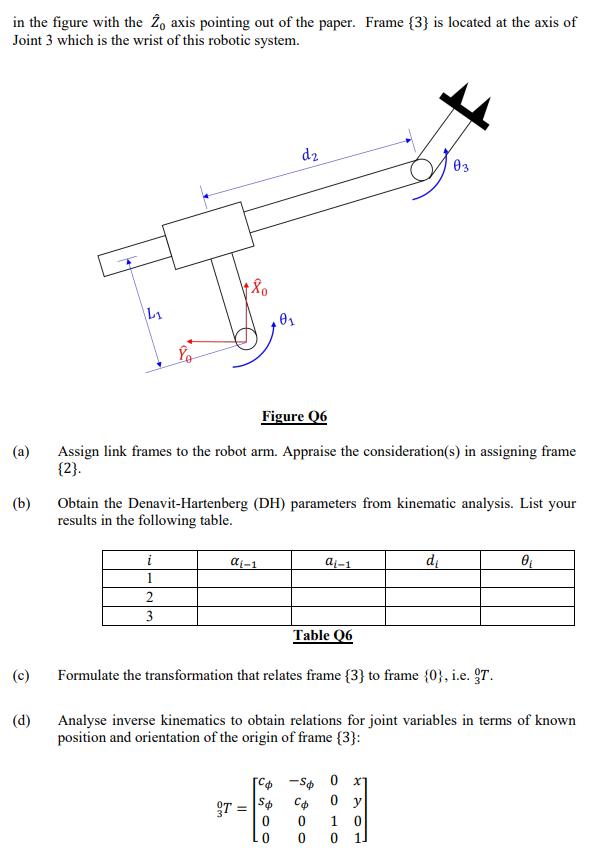

Consider an RPR plannar robot shown in Figure Q6. The robotic system has three-degrees of freedom; the joint variables are 0, d and 03. It is noted that the dimension L is fixed and the dimension d is used to denote the movement of prismatic Joint 2. For kinematic analysis, Frame {0} is the base frame; the base coordinate system XYoZo is shown in the figure with the 2o axis pointing out of the paper. Frame {3} is located at the axis of Joint 3 which is the wrist of this robotic system. (a) (b) (c) (d) L1 180 i 1 2 3 Figure Q6 Assign link frames to the robot arm. Appraise the consideration(s) in assigning frame {2}. Obtain the Denavit-Hartenberg (DH) parameters from kinematic analysis. List your results in the following table. {-1 0 dz T= So 0 0 ai-1 Table Q6 03 di Formulate the transformation that relates frame {3} to frame {0}, i.e. gr. Analyse inverse kinematics to obtain relations for joint variables in terms of known position and orientation of the origin of frame {3}: 0x1 Co 0 y 0 1 0 0 0 0 where x and y is the coordinate of the wrist and is the orientation of Link 3 (end- effector) in the plane with respective to X.
Step by Step Solution
★★★★★
3.42 Rating (149 Votes )
There are 3 Steps involved in it
Step: 1
The RPR planar robot shown in the Chegg question has three degrees of freedom which means that it can be moved in three independent ways These three d...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Cornerstones Of Cost Management
Authors: Don R. Hansen, Maryanne M. Mowen
3rd Edition
9781305147102, 1285751787, 1305147103, 978-1285751788