

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Consider the following optimal control problem. T min J = o^ (2z(t) + 4(t) + u(t) dt + z(T) + 10(t) z +u, z(0)
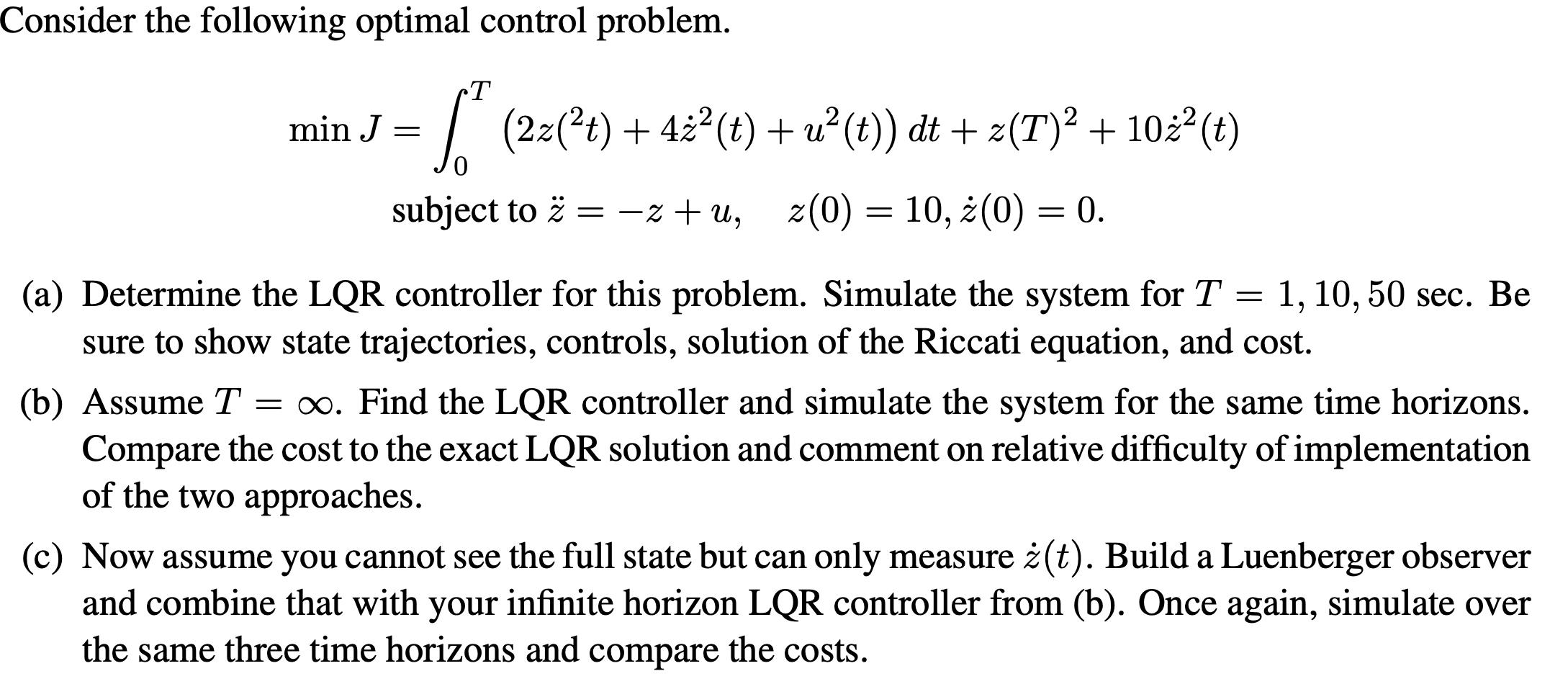
Consider the following optimal control problem. T min J = o^ (2z(t) + 4(t) + u(t) dt + z(T) + 10(t) z +u, z(0) = 10, (0) = 0. subject to * = (a) Determine the LQR controller for this problem. Simulate the system for T = 1, 10, 50 sec. Be sure to show state trajectories, controls, solution of the Riccati equation, and cost. (b) Assume T = . Find the LQR controller and simulate the system for the same time horizons. Compare the cost to the exact LQR solution and comment on relative difficulty of implementation of the two approaches. (c) Now assume you cannot see the full state but can only measure (t). Build a Luenberger observer and combine that with your infinite horizon LQR controller from (b). Once again, simulate over the same three time horizons and compare the costs.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Introduction to Operations Research
Authors: Frederick S. Hillier, Gerald J. Lieberman
10th edition
978-0072535105, 72535105, 978-1259162985