

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Exercise 3.1 In terms of the s, s, 2s coordinates of a fixed space frame {s}, the frame {a} has its a-axis pointing in
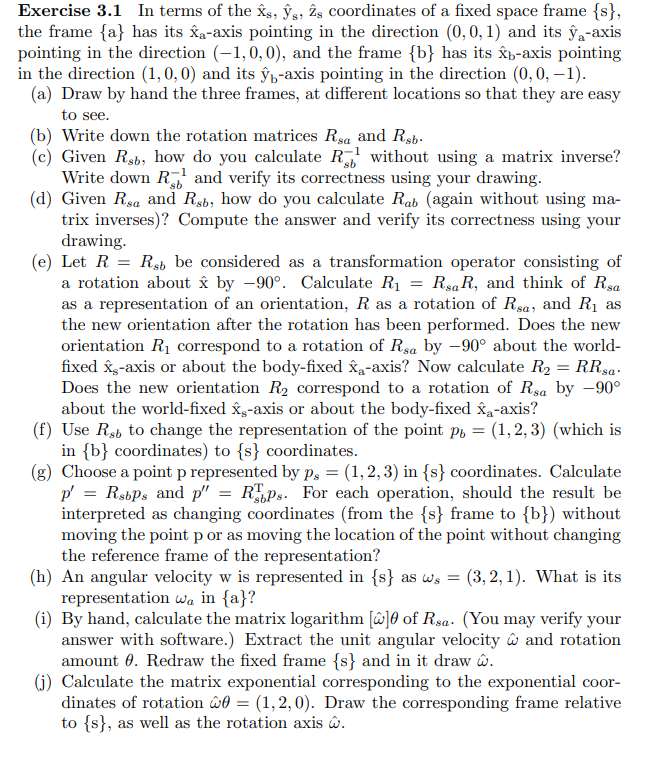
Exercise 3.1 In terms of the s, s, 2s coordinates of a fixed space frame {s}, the frame {a} has its a-axis pointing in the direction (0,0,1) and its -axis pointing in the direction (-1,0,0), and the frame {b} has its x-axis pointing in the direction (1,0,0) and its -axis pointing in the direction (0, 0, -1). (a) Draw by hand the three frames, at different locations so that they are easy to see. (b) Write down the rotation matrices Rsa and Rsb- (c) Given Rsb, how do you calculate R without using a matrix inverse? Write down Rand verify its correctness using your drawing. 'sb (d) Given Rsa and Rsb, how do you calculate Rab (again without using ma- trix inverses)? Compute the answer and verify its correctness using your drawing. (e) Let R = Rsb be considered as a transformation operator consisting of a rotation about by -90. Calculate R = Rsa R, and think of Rsa as a representation of an orientation, R as a rotation of Rsa, and R as the new orientation after the rotation has been performed. Does the new orientation R correspond to a rotation of Rsa by -90 about the world- fixed x-axis or about the body-fixed x-axis? Now calculate R = RRsa. Does the new orientation R correspond to a rotation of Rsa by -90 about the world-fixed x-axis or about the body-fixed -axis? (f) Use Rsb to change the representation of the point p = (1,2,3) (which is in {b} coordinates) to {s} coordinates. (g) Choose a point p represented by ps = (1,2,3) in {s} coordinates. Calculate p' = Rsbps and p" = Rps. For each operation, should the result be interpreted as changing coordinates (from the {s} frame to {b}) without moving the point p or as moving the location of the point without changing the reference frame of the representation? (h) An angular velocity w is represented in {s} as ws = (3,2,1). What is its representation wa in {a}? (i) By hand, calculate the matrix logarithm [w] of Rsa. (You may verify your answer with software.) Extract the unit angular velocity and rotation amount 0. Redraw the fixed frame {s} and in it draw . (j) Calculate the matrix exponential corresponding to the exponential coor- dinates of rotation 0 = (1,2,0). Draw the corresponding frame relative to {s}, as well as the rotation axis .
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Shigleys Mechanical Engineering Design
Authors: Richard G. Budynas, J. Keith Nisbett
9th edition
77679520, 73529281, 1259986241, 978-0077679521, 9780073529288, 9781259986246, 978-1121345317