

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Fig. 2 shows a configuration for a 3R manipulator (Fig. 2 shows zero configuration). Find the D-H parameters and compute the forward kinematics map
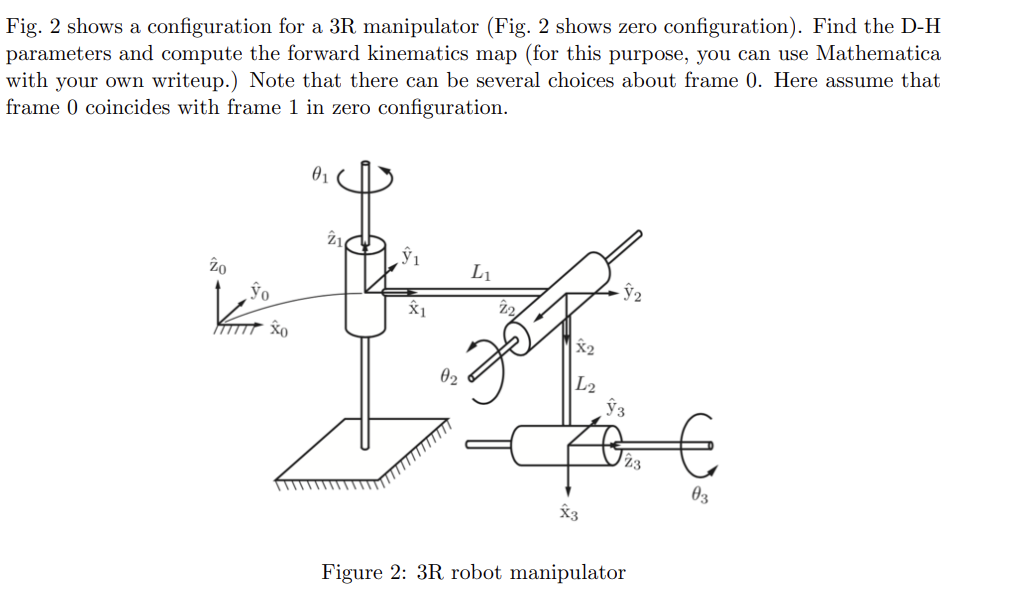
Fig. 2 shows a configuration for a 3R manipulator (Fig. 2 shows zero configuration). Find the D-H parameters and compute the forward kinematics map (for this purpose, you can use Mathematica with your own writeup.) Note that there can be several choices about frame 0. Here assume that frame 0 coincides with frame 1 in zero configuration. Zo Lo YTTTTT Xo 0 21 02 L X L2 X3 Y3 Z3 Figure 2: 3R robot manipulator 03
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Introductory Econometrics A Modern Approach
Authors: Jeffrey M. Wooldridge
4th edition
978-0324581621, 324581629, 324660545, 978-0324660548