

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Fig shows a robot arm with two degrees of freedom, where the link lengths are L1=0.6m, L2=0.3m. The motion ranges for link 1 and
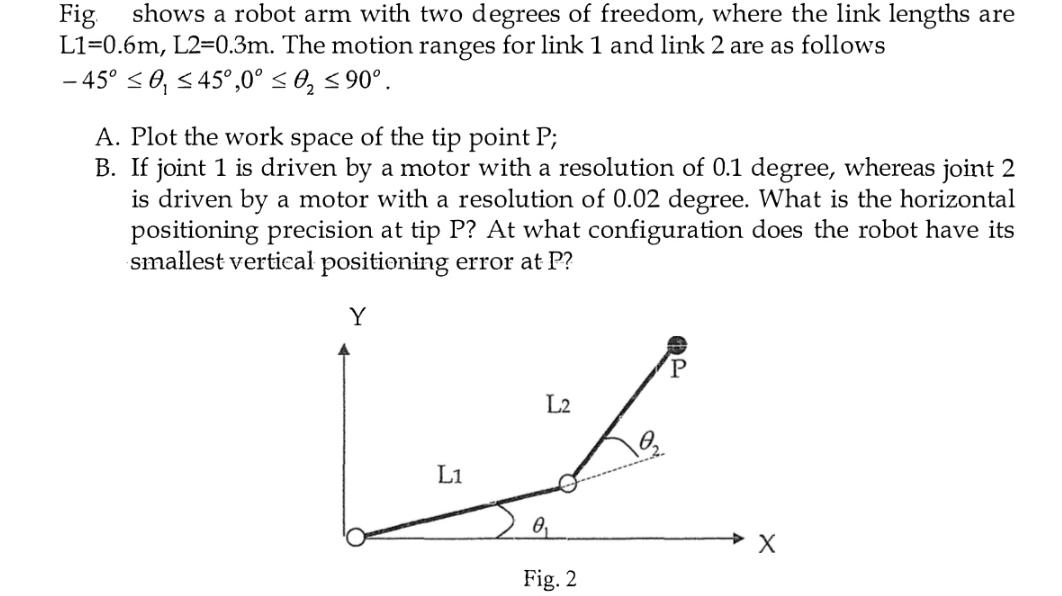
Fig shows a robot arm with two degrees of freedom, where the link lengths are L1=0.6m, L2=0.3m. The motion ranges for link 1 and link 2 are as follows -45 0, 45,0 0 90. A. Plot the work space of the tip point P; B. If joint 1 is driven by a motor with a resolution of 0.1 degree, whereas joint 2 is driven by a motor with a resolution of 0.02 degree. What is the horizontal positioning precision at tip P? At what configuration does the robot have its smallest vertical positioning error at P? Y L1 L2 Fig. 2 X
Step by Step Solution
★★★★★
3.33 Rating (147 Votes )
There are 3 Steps involved in it
Step: 1
The workspace of the tip P is plotted in the graph be...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Mathematical Interest Theory
Authors: Leslie Jane, James Daniel, Federer Vaaler
3rd Edition
147046568X, 978-1470465681