

Question: hand solve in details please! - Active front steering is used in front-steering four-wheel cars to control the yaw rate of the vehicle as a
hand solve in details please!
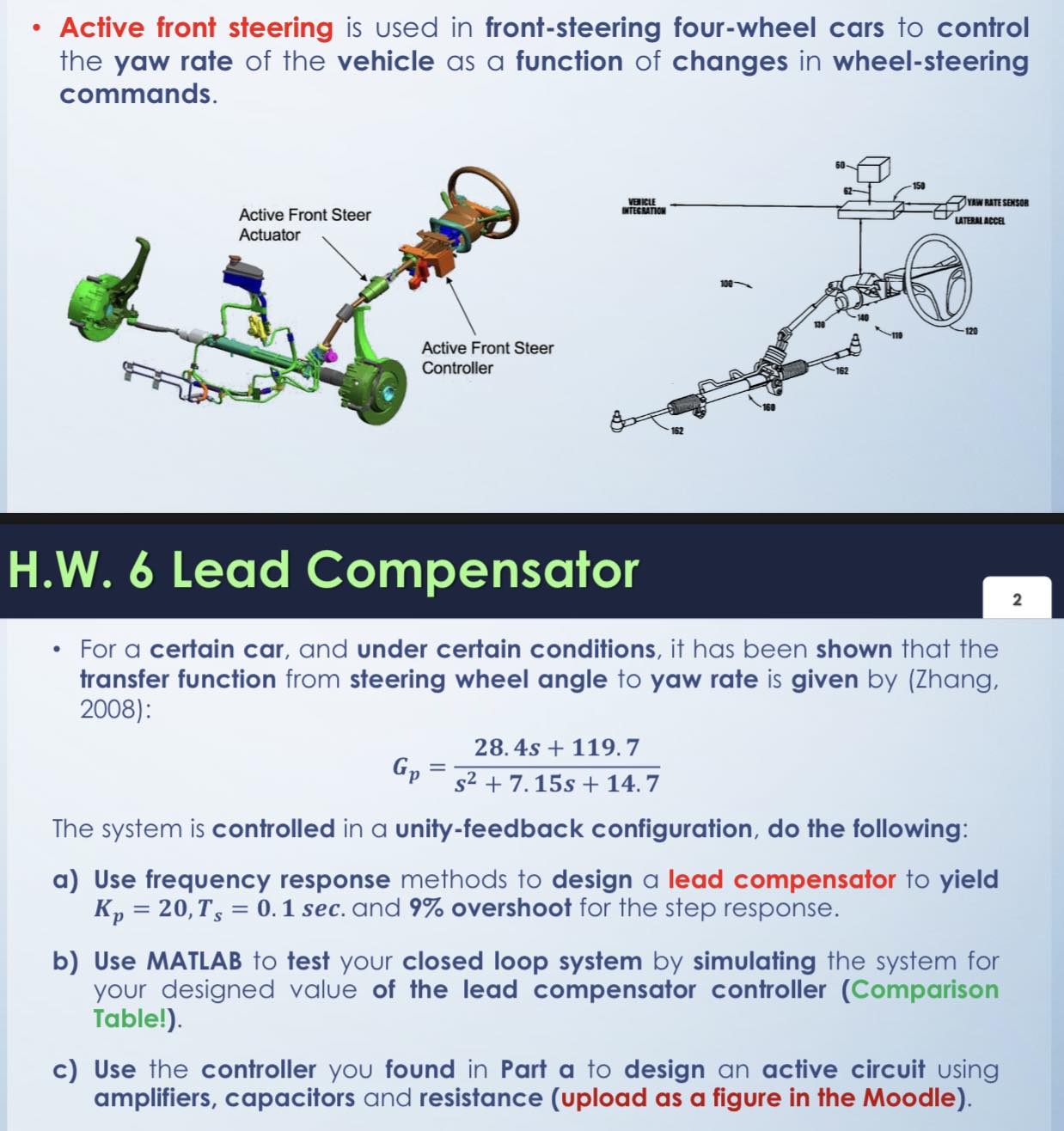
- Active front steering is used in front-steering four-wheel cars to control the yaw rate of the vehicle as a function of changes in wheel-steering commands. W. 6 Lead Compensator 2 - For a certain car, and under certain conditions, it has been shown that the transfer function from steering wheel angle to yaw rate is given by (Zhang, 2008): Gp=s2+7.15s+14.728.4s+119.7 The system is controlled in a unity-feedback configuration, do the following: a) Use frequency response methods to design a lead compensator to yield Kp=20,Ts=0.1sec. and 9% overshoot for the step response. b) Use MATLAB to test your closed loop system by simulating the system for your designed value of the lead compensator controller (Comparison Table!). c) Use the controller you found in Part a to design an active circuit using amplifiers, capacitors and resistance (upload as a figure in the Moodle)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts