

Active front steering is used in front-steering four wheel cars to control the yaw rate of the
Question:
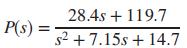
Active front steering is used in front-steering four wheel cars to control the yaw rate of the vehicle as a function of changes in wheel-steering commands. For a certain car, and under certain conditions, it has been shown that the transfer function from steering wheel angle to yaw rate is given by (Zhang, 2008):
The system is controlled in a unity-feedback configuration.
a. Use the Nichols chart and follow the procedure of Example 11.5 to design a lag-lead compensator such that the system has zero steady-state error for a step input. The bandwidth of the closed-loop system must be ωB = 10 rad/sec. Let the open-loop magnitude response peak be less than 1 dB and the steady-state error constant Kv = 20.
b. Relax the bandwidth requirement to ωB ≥ 10 rad/sec. Design the system for a steady-state error of zero for a step input. Let the open-loop magnitude response peak be less than 1 dB and Kv = 20 using only a lead compensator.
c. Simulate the step response of both designs using MATLAB.
Step by Step Answer:
To design the laglead compensator and the lead compensator we need to follow a systematic approach Heres a stepbystep guide to solving the problem a Designing a laglead compensator for zero steadystat...View the full answer



