

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
here information and here are the questions all answers must be in mattox form and include only integers In terms of the x^n,y^n,z^1 coordinates of
here information 
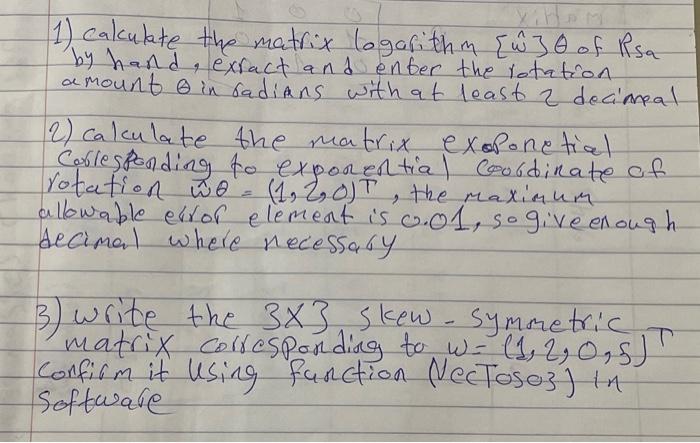
In terms of the x^n,y^n,z^1 coordinates of a fixed space frame (s), the frame (a) has its x^a-axis pointing in the direction (0,0,1) and its y^a-axis pointing in the (b) frames, similar to examples in the book and videos (e.g. Figure 3.7 in the book), for easy reference in this question and later questions. 1) calculate the matrix logafithm [w^] of Rsa by hand, exract and enber the rotation amount in radians with at least 2 decimpal 2) calculate the matrix exoponetial corlesponding to exponential coordinate of rotation =(1,2,0)T, the maximum allowable error element is 0.01 , sogive enough decimal where necessary 3) Write the 33 skew - symmetric matrix corresponding to =(1,2,0,5) confirm it using function (NecToso3) in Software and here are the questions
all answers must be in mattox form and include only integers
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Heat Transfer
Authors: Jack Holman
10th edition
73529362, 978-0073529363