

Question
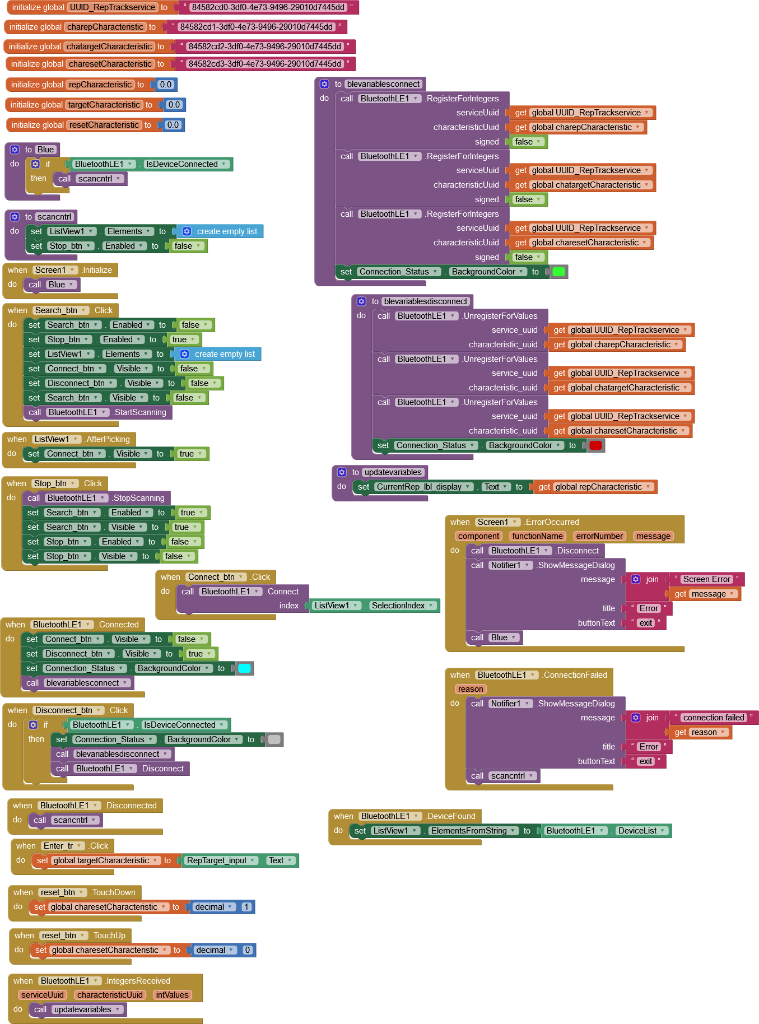
I need help with MIT app inventor and my Arduino. Could someone look at my attached code and block in the app inventor and tell
I need help with MIT app inventor and my Arduino. Could someone look at my attached code and block in the app inventor and tell me why it wont run. The idea behind the app is to preset a value to the Arduino. The Arduino will utilize the gyroscope and every up down motion will count as 1. Once the preset value has been met the red LED will turn on. I am getting a lot of errors when I run the 2 together. Please help.
#include
#include
float X,Y,Z;//Float variable to be used in the gyroscope
#define LED 13//defines LED as pin 13
///Establishes GUUID along wiith the three characteristics
const char * UUID_RepTrackservice = "84582cd0-3df0-4e73-9496-29010d7445dd" ;
const char * UUID_repCharacteristic = "84582cd1-3df0-4e73-9496-29010d7445dd" ;
const char * UUID_targetCharacteristic = "84582cd2-3df0-4e73-9496-29010d7445dd" ;
const char * UUID_resetCharacteristic = "84582cd3-3df0-4e73-9496-29010d7445dd" ;
//Establishes the service along with defining the characteristics as a float
BLEService RepTrackservice ( UUID_RepTrackservice );
BLEIntCharacteristic repCharacteristic( UUID_repCharacteristic, BLERead | BLENotify );
BLEIntCharacteristic targetCharacteristic ( UUID_targetCharacteristic, BLEWrite | BLENotify );
BLEIntCharacteristic resetCharacteristic( UUID_resetCharacteristic, BLERead | BLENotify );
int presetValue = 5;// max value for z axis to detect rep count
int currentValue = 0;//Current z axis value
int repAmount=0;//variable used to hold rep amount sent to app commented out for troubleshooting
int repTarget=0;//variable used to hold repetitions wanted sent from app commented out for troubleshooting
int reset=0;//Variable to reset the count sent from app commented out for troubleshooting
//Setting up the arduinos outputs
void setup ()
{
Serial.begin(115200);//begin the bluetooth
uint32_t t=millis();
while (!Serial) // delay 5sec connection
{
if ((millis()-t) > 5000) break;
}
bool err=false;
if (!IMU.begin())
{
Serial.println("IMU: failed");
err=true;
}
Serial.println("IMU: ok");
// init BLE
if (!BLE.begin())
{
Serial.println("BLE: failed");
err=true;
}
Serial.println("BLE: ok");
// error: flash led forever
if (err)
{
Serial.println("Init error. System halted");
}
BLE.setLocalName("RepTrack2.0");//sets the local name
BLE.setDeviceName("RepTrack");
BLE.setAdvertisedService (RepTrackservice);//setting the service to be advertised
//Adds services to their own charcteristics
RepTrackservice.addCharacteristic ( repCharacteristic ) ;
RepTrackservice.addCharacteristic ( targetCharacteristic ) ;
RepTrackservice.addCharacteristic ( resetCharacteristic ) ;
BLE.addService ( RepTrackservice);//service is added to he BLE
//Sets values so that they do not transmit random values
repCharacteristic.writeValue ( 0 );
targetCharacteristic.writeValue ( 0 );
resetCharacteristic.writeValue ( 0 );
BLE.advertise();//Publishes the service to start
pinMode (LED, OUTPUT);//sets LED as an output
digitalWrite(LED, LOW);//turns off LED in case it was on
}
void loop()
{
static long preMillis = 0;
int command=0;
// looks for BLE central devices
BLEDevice central = BLE.central();
// Checks for connection
if (central)
{
Serial.print("Connected to central: ");
Serial.println(central.address()); // prints address
// Loop while connected
while (central.connected())
{
if (targetCharacteristic.written())
{
command = targetCharacteristic.value(); // retrieve value from app
repTarget=command;
Serial.print(F("commmand value: "));
Serial.println(command);
}
long curMillis = millis();
if (preMillis>curMillis) preMillis=0;
if (curMillis - preMillis >= 10) // check values every 10mS
{
preMillis = curMillis;
updateApp(); // Calls function to send values to app
}
}
// To disconnect
Serial.print(F("Disconnected from central: "));
Serial.println(central.address());
}
}
//Updating the app function
void updateApp()
{
//Starting the scan to monitor the gyroscope
//Checking to see if the Gyro is online and then Reads all 3 axis
if (IMU.gyroscopeAvailable())
{
IMU.readGyroscope(X, Y, Z);
currentValue =Z;//sets current value to the value of Z from the gryo
}
//Comparison that is the current value of z is greater than or equal to the preset, then you increase the rep amount. This means a rep was done
if (currentValue >= presetValue)
{
repAmount=repAmount+1;
repCharacteristic.writeValue(repAmount);//updates the live value
}
//If it was not greater then the repamount stays the same
else
{
//repAmount=repAmount;
repAmount=repAmount;
}
//displays values for visual purpose
Serial.print("Z:");
Serial.print(Z);
Serial.print("Current Value:");
// Serial.println(currentValue);
// Serial.println(repAmount);//Sends repamout to app
Serial.println();
delay(100);
//Checks to see if the repAmount is greater than or equal to the rep target, if yes then the LED will light up
if (repAmount >= repTarget)
{
digitalWrite(LED, HIGH);
}
//If not then LED stays off
else
{
digitalWrite(LED, LOW);
}
delay(1000);// Delay to keep the system from readding two reps within a second
//Reset for the rep amount, recieved from the app
if (reset==1)
{
digitalWrite(LED,LOW);
repAmount=0;
targetCharacteristic.writeValue(repAmount);
}
}
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Oracle Database 12c Dba Handbook Manage A Scalable Secure Oracle Enterprise Database Environment
Authors: Bob Bryla
1st Edition
0071798781, 978-0071798785