

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Intro to Robotics: Homework 5 : The Jacobian Inverse Name Date: Observe the 2 link planar robot shown below with a 1 = 3 0
Intro to Robotics: Homework : The Jacobian Inverse
Name
Date:
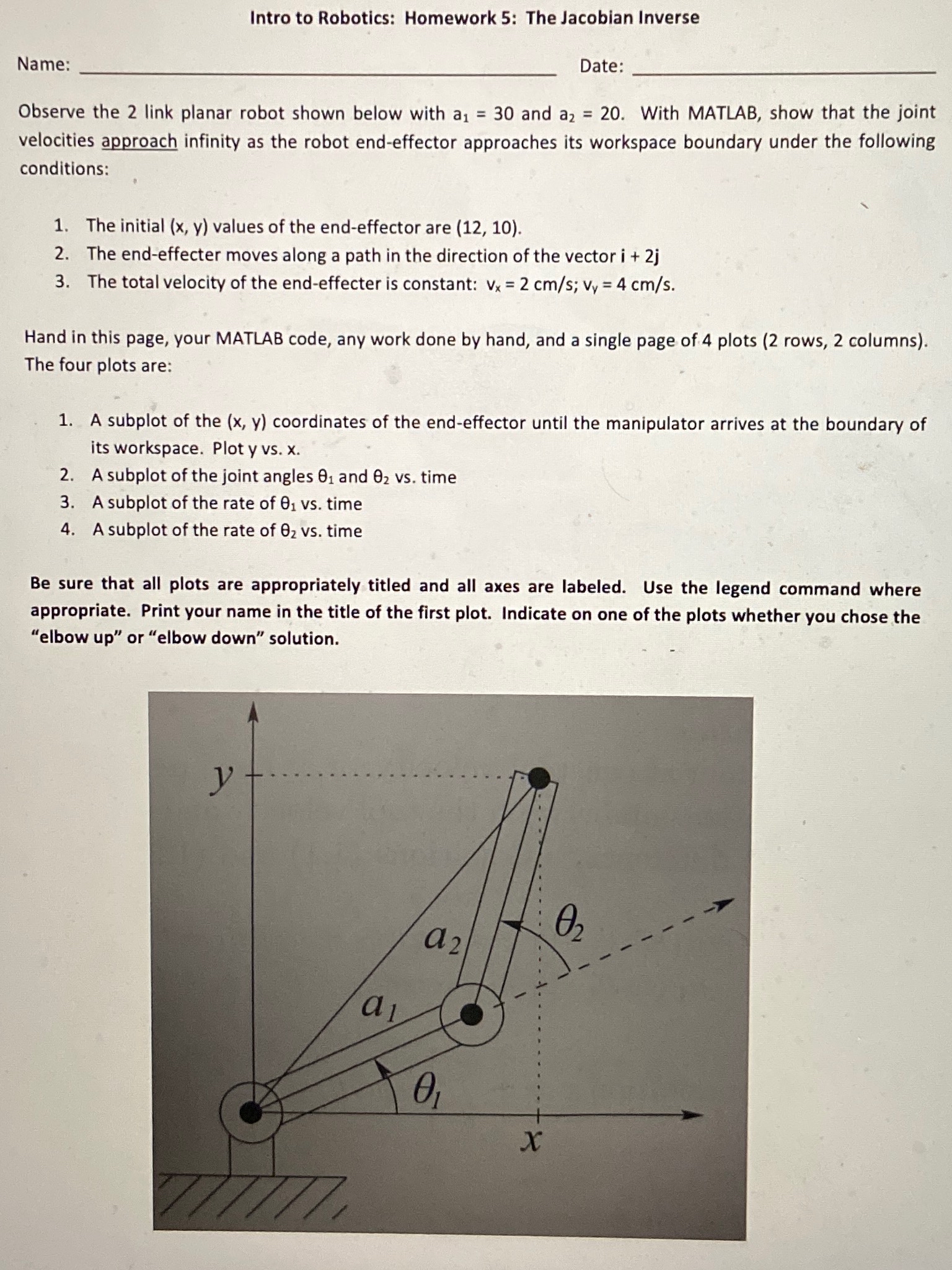
Observe the link planar robot shown below with and With MATLAB, show that the joint velocities approach infinity as the robot endeffector approaches its workspace boundary under the following conditions:
The initial values of the endeffector are
The endeffecter moves along a path in the direction of the vector
The total velocity of the endeffecter is constant: ;
Hand in this page, your MATLAB code, any work done by hand, and a single page of plots rows, columns The four plots are:
A subplot of the coordinates of the endeffector until the manipulator arrives at the boundary of its workspace. Plot vs
A subplot of the joint angles and vs time
A subplot of the rate of vs time
A subplot of the rate of vs time
Be sure that all plots are appropriately titled and all axes are labeled. Use the legend command where appropriate. Print your name in the title of the first plot. Indicate on one of the plots whether you chose the "elbow up or "elbow down" solution.
Inverse kinematic function doesnt work on matlab. Please help
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
SQL For Data Science Data Cleaning Wrangling And Analytics With Relational Databases
Authors: Antonio Badia
1st Edition
3030575918, 978-3030575915