

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
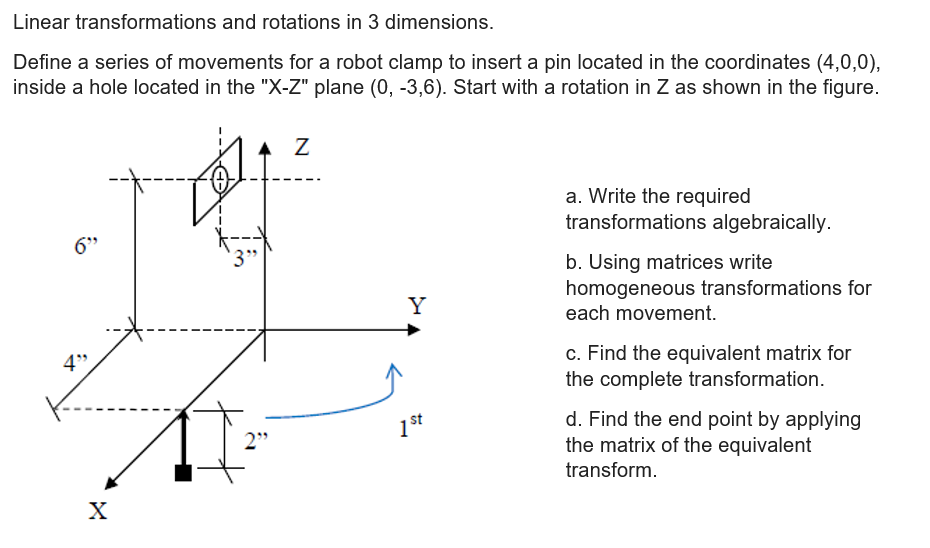
Linear transformations and rotations in 3 dimensions Define a series of movements for a robot clamp to insert a pin located in the coordinates (4,0,0),
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Secrets Of Analytical Leaders Insights From Information Insiders
Authors: Wayne Eckerson
1st Edition
1935504347, 9781935504344