Nota: usar el modelo de DH y matlab
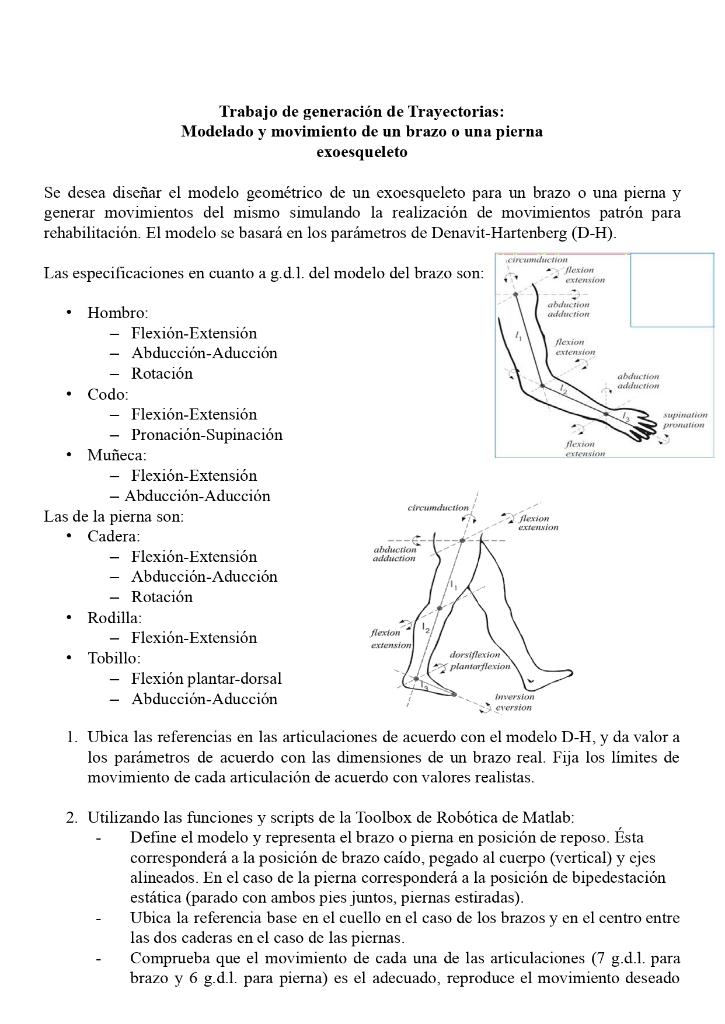
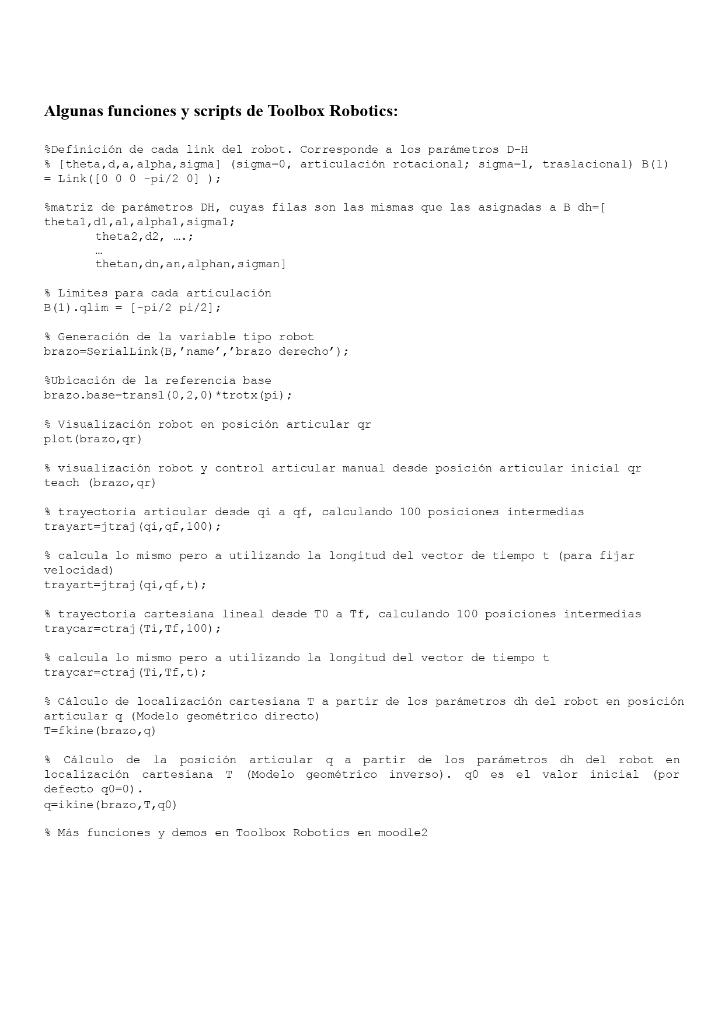
Trabajo de generacin de Trayectorias: Modelado y movimiento de un brazo o una pierna exoesqueleto Se desea disear el modelo geomtrico de un exoesqueleto para un brazo o una pierna y generar movimientos del mismo simulando la realizacin de movimientos patrn para rehabilitacin. El modelo se basar en los parmetros de Denavit-Hartenberg (D-H). Las especificaciones en cuanto a g.d.l. del modelo del brazo son: Cruction . Mexion - extension abduction udduction Mexiom extension abduction eduction . man Milion flexion exterviu Hombro: Flexin-Extensin Abduccin-Aduccin Rotacin Codo: Flexin-Extensin Pronacin-Supinacin Mueca: - Flexion-Extensin - Abduccin-Aduccin Las de la pierna son: Cadera: - Flexin-Extensin Abduccin-Aduccin Rotacin Rodilla: Flexin-Extensin Tobillo: - Flexin plantar-dorsal - Abduccin-Aduccin circumduction flexion extension abduction adduction 11 12 flexion extension . dorsiflexion as plantar flexion mersion version 1. Ubica las referencias en las articulaciones de acuerdo con el modelo D-H, y da valor a los parmetros de acuerdo con las dimensiones de un brazo real. Fija los lmites de movimiento de cada articulacin de acuerdo con valores realistas. 2. Utilizando las funciones y scripts de la Toolbox de Robtica de Matlab: Define el modelo y representa el brazo o pierna en posicin de reposo. sta corresponder a la posicin de brazo cado, pegado al cuerpo (vertical) y ejes alineados. En el caso de la pierna corresponder a la posicin de bipedestacin esttica (parado con ambos pies juntos, piernas estiradas). Ubica la referencia base en el cuello en el caso de los brazos y en el centro entre las dos caderas en el caso de las piernas. Comprueba que el movimiento de cada una de las articulaciones (7 g.d.l. para brazo y 6 g. d.1. para pierna) es el adecuado, reproduce el movimiento deseado para esa articulacin, y registra posiciones especficas representativas para cada uno de ellos. Se recomienda para la visualizacin grfica en 3D el script Matlab "plot(brazo,q)", donde brazo es un objeto Matlab tipo robot y q es un vector de posiciones articulares en las que se representa el robot. Con el script "teach(brazo,q)" se puede controlar individualmente cada articulacin, visualizar el movimiento en una grfica 3D, y fijar los lmites del movimiento de cada articulacin. 3. Implementa las trayectorias patrn definidas para cada alumno en el fichero "asignacin-trabajo.pdf", y simlalas en Matlab. Los movimientos deben realizarse como movimiento articular coordinado". Representa las trayectorias y velocidades articulares, comprobando que no se sobrepasan los lmites de posicin ni de velocidad. Ajstalo si es necesario. 4. Calcula las localizaciones cartesianas de las posiciones extremas de las trayectorias, utilizando Matlab. Genera una trayectoria rectilinea las localizaciones inicial y final. Analiza las trayectorias articulares correspondientes, verifica si son posibles (dentro de rangos), naturales o si hay alguna singularidad. Si es necesario utiliza posiciones- orientaciones intermedias (va), para conseguir movimientos posibles o ms naturales. Resultados a entregar. A cada alumno se le asignar una trayectoria a realizar. Se presentar: 1. Breve memoria (pdf) con: a. Modelo D-H (punto 1 de prctica) b. Visualizacin en Matlab del brazo o pierna en diferentes posiciones correspondientes al movimiento de cada articulacin. (punto 2 de la prctica) c. Grficos de trayectorias y velocidades articulares para todas las articulaciones y cartesianas para cada coordenada operacional. d. Visualizacin del robot en varias posiciones caractersticas representativas de las trayectorias articulares y cartesianas. En la memoria, explicar y analizar brevemente los resultados de cada apartado. 2. Ficheros Matlab desarrollados (ficheros.m), con ejecucin correcta. 3. Simulacin Matlab en brazo.avi (video de animacin) Algunas funciones y scripts de Toolbox Robotics: Definicin de cada link del robot. Corresponde a los parmetros D-H [theta, d, a, alpha, signa] (sigma-o, articulacin rotacional; sigma-l, traslacional) B(1) = Link ( [0 0 0 -pi/201); Smatriz de parmetros DH, cuyas filas son las mismas que les asignadas a B dh- thetal, di, al, alphal, sigmal; theta2, d2, .; thetan,dn, an, alphan, aigman Limites para cada articulacin B(1).qlim = (-pi/2 pi/2]; Generacin de la variable tipo robot brazo=seriallink (B, 'name','brazo derecho'); Subicacin de la referencia base brazo.base-transl(0,2,0) trotx (pi): $ Visualizacin robot en posicin articular gr plot (brazo, gr) visualizacin robot y control articular manual desde posicin articular inicial qr teach (brazo, 90) trayectoria articular desde qi a gf, calculando 100 posiciones intermedias trayart=jtraj (qi,qf, 100); $ calcula lo mismo pero a utilizando la longitud del vector de tiempo t (para fijar velocidad) trayart=jtraj (qi,qf,t); trayectoria cartesiana lineal desde TO a Tf, calculando 100 posiciones intermedias trayear=ctraj (Ti,Tf, 100); % calcula lo mismo pero a utilizando la longitud del vector de tiempo t traycar-ctraj (Ti,TE,t); clculo de localizacin cartesiana T a partir de los parmetros dh dei robot en posicin articular a (Modelo geomtrico directo) T=Ekine (brazo,9) $ Clculo de la posicin articular a a partir de los parmetros dh del robot en localizacin cartesiana (Modelo geomtrico inverso). 90 es el valor inicial (por defecto q0-0). q=ikine (brazo, T, 90) Ms funciones y demos en Toolbox Robotics en moodle2 Trabajo de generacin de Trayectorias: Modelado y movimiento de un brazo o una pierna exoesqueleto Se desea disear el modelo geomtrico de un exoesqueleto para un brazo o una pierna y generar movimientos del mismo simulando la realizacin de movimientos patrn para rehabilitacin. El modelo se basar en los parmetros de Denavit-Hartenberg (D-H). Las especificaciones en cuanto a g.d.l. del modelo del brazo son: Cruction . Mexion - extension abduction udduction Mexiom extension abduction eduction . man Milion flexion exterviu Hombro: Flexin-Extensin Abduccin-Aduccin Rotacin Codo: Flexin-Extensin Pronacin-Supinacin Mueca: - Flexion-Extensin - Abduccin-Aduccin Las de la pierna son: Cadera: - Flexin-Extensin Abduccin-Aduccin Rotacin Rodilla: Flexin-Extensin Tobillo: - Flexin plantar-dorsal - Abduccin-Aduccin circumduction flexion extension abduction adduction 11 12 flexion extension . dorsiflexion as plantar flexion mersion version 1. Ubica las referencias en las articulaciones de acuerdo con el modelo D-H, y da valor a los parmetros de acuerdo con las dimensiones de un brazo real. Fija los lmites de movimiento de cada articulacin de acuerdo con valores realistas. 2. Utilizando las funciones y scripts de la Toolbox de Robtica de Matlab: Define el modelo y representa el brazo o pierna en posicin de reposo. sta corresponder a la posicin de brazo cado, pegado al cuerpo (vertical) y ejes alineados. En el caso de la pierna corresponder a la posicin de bipedestacin esttica (parado con ambos pies juntos, piernas estiradas). Ubica la referencia base en el cuello en el caso de los brazos y en el centro entre las dos caderas en el caso de las piernas. Comprueba que el movimiento de cada una de las articulaciones (7 g.d.l. para brazo y 6 g. d.1. para pierna) es el adecuado, reproduce el movimiento deseado para esa articulacin, y registra posiciones especficas representativas para cada uno de ellos. Se recomienda para la visualizacin grfica en 3D el script Matlab "plot(brazo,q)", donde brazo es un objeto Matlab tipo robot y q es un vector de posiciones articulares en las que se representa el robot. Con el script "teach(brazo,q)" se puede controlar individualmente cada articulacin, visualizar el movimiento en una grfica 3D, y fijar los lmites del movimiento de cada articulacin. 3. Implementa las trayectorias patrn definidas para cada alumno en el fichero "asignacin-trabajo.pdf", y simlalas en Matlab. Los movimientos deben realizarse como movimiento articular coordinado". Representa las trayectorias y velocidades articulares, comprobando que no se sobrepasan los lmites de posicin ni de velocidad. Ajstalo si es necesario. 4. Calcula las localizaciones cartesianas de las posiciones extremas de las trayectorias, utilizando Matlab. Genera una trayectoria rectilinea las localizaciones inicial y final. Analiza las trayectorias articulares correspondientes, verifica si son posibles (dentro de rangos), naturales o si hay alguna singularidad. Si es necesario utiliza posiciones- orientaciones intermedias (va), para conseguir movimientos posibles o ms naturales. Resultados a entregar. A cada alumno se le asignar una trayectoria a realizar. Se presentar: 1. Breve memoria (pdf) con: a. Modelo D-H (punto 1 de prctica) b. Visualizacin en Matlab del brazo o pierna en diferentes posiciones correspondientes al movimiento de cada articulacin. (punto 2 de la prctica) c. Grficos de trayectorias y velocidades articulares para todas las articulaciones y cartesianas para cada coordenada operacional. d. Visualizacin del robot en varias posiciones caractersticas representativas de las trayectorias articulares y cartesianas. En la memoria, explicar y analizar brevemente los resultados de cada apartado. 2. Ficheros Matlab desarrollados (ficheros.m), con ejecucin correcta. 3. Simulacin Matlab en brazo.avi (video de animacin) Algunas funciones y scripts de Toolbox Robotics: Definicin de cada link del robot. Corresponde a los parmetros D-H [theta, d, a, alpha, signa] (sigma-o, articulacin rotacional; sigma-l, traslacional) B(1) = Link ( [0 0 0 -pi/201); Smatriz de parmetros DH, cuyas filas son las mismas que les asignadas a B dh- thetal, di, al, alphal, sigmal; theta2, d2, .; thetan,dn, an, alphan, aigman Limites para cada articulacin B(1).qlim = (-pi/2 pi/2]; Generacin de la variable tipo robot brazo=seriallink (B, 'name','brazo derecho'); Subicacin de la referencia base brazo.base-transl(0,2,0) trotx (pi): $ Visualizacin robot en posicin articular gr plot (brazo, gr) visualizacin robot y control articular manual desde posicin articular inicial qr teach (brazo, 90) trayectoria articular desde qi a gf, calculando 100 posiciones intermedias trayart=jtraj (qi,qf, 100); $ calcula lo mismo pero a utilizando la longitud del vector de tiempo t (para fijar velocidad) trayart=jtraj (qi,qf,t); trayectoria cartesiana lineal desde TO a Tf, calculando 100 posiciones intermedias trayear=ctraj (Ti,Tf, 100); % calcula lo mismo pero a utilizando la longitud del vector de tiempo t traycar-ctraj (Ti,TE,t); clculo de localizacin cartesiana T a partir de los parmetros dh dei robot en posicin articular a (Modelo geomtrico directo) T=Ekine (brazo,9) $ Clculo de la posicin articular a a partir de los parmetros dh del robot en localizacin cartesiana (Modelo geomtrico inverso). 90 es el valor inicial (por defecto q0-0). q=ikine (brazo, T, 90) Ms funciones y demos en Toolbox Robotics en moodle2