

Calculation of the position (position : X, Y, Z) and direction (orientation: A, B, C are yaw, pitch, roll angles respectively) of the tool
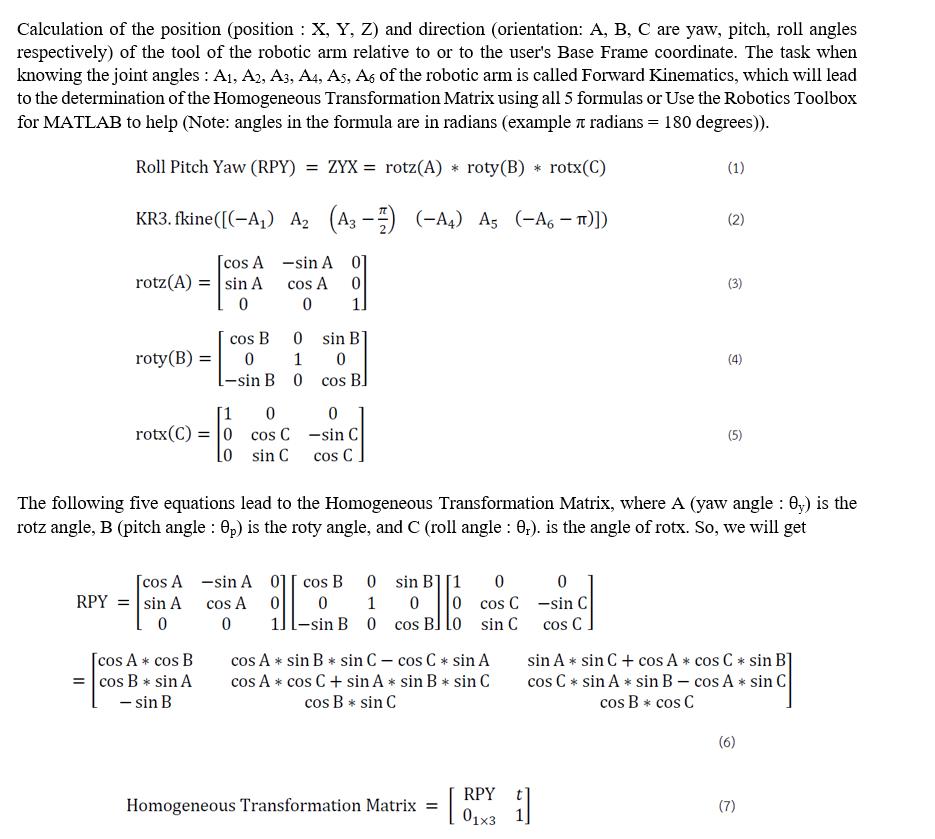
Calculation of the position (position : X, Y, Z) and direction (orientation: A, B, C are yaw, pitch, roll angles respectively) of the tool of the robotic arm relative to or to the user's Base Frame coordinate. The task when knowing the joint angles: A, A2, A3, A4, A5, A6 of the robotic arm is called Forward Kinematics, which will lead to the determination of the Homogeneous Transformation Matrix using all 5 formulas or Use the Robotics Toolbox for MATLAB to help (Note: angles in the formula are in radians (example radians = 180 degrees)). (1) Roll Pitch Yaw (RPY) = ZYX = rotz(A)* roty(B)* rotx(C) KR3. fkine ([(-A) A (A3-) (-A4) A5 (-A6-)]) [cos A -sin A 0] cos A 0 rotz(A) = sin A 0 0 11 roty (B) = cos B 0 1-sin B [cos A RPY = sin A 0 1 0 rotx(C) = 0 [cos A * cos B = cos B * sin A - sin B 0 1 0 0 cos C-sin C Lo sin C cos C sin B 0 cos B -sin A cos A 0 The following five equations lead to the Homogeneous Transformation Matrix, where A (yaw angle : 0y) is the rotz angle, B (pitch angle : 0p) is the roty angle, and C (roll angle : 0). is the angle of rotx. So, we will get 0 Dallo conc 0 0 cos C 0 sin B] [1 01 cos B 0 0 1 1-sin B 0 COS cos A * sin B*sin C - cos C * sin A cos A * cos C + sin A * sin B * sin C cos B * sin C Homogeneous Transformation Matrix = - RPY 01x3 1 (2) 0 -sin C cos C (3) (4) (5) sin Asin C + cos A * cos C * sin B] cos C sin A * sin B - cos A * sin C cos B * cos C (6) (7)
Step by Step Solution
3.34 Rating (157 Votes )
There are 3 Steps involved in it
Step: 1
To calculate the position X Y Z and direction A B C of the tool of the robotic arm relative to the ...
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Authors: James M. Wahlen, Stephen P. Baginski, Mark Bradshaw
9th Edition
1337614689, 1337614688, 9781337668262, 978-1337614689