

Question
Please help me to rebulid the codes to fix the error of 'NoneType' object is not callable for both LQR and MPC, and help me
Please help me to rebulid the codes to fix the error of "'NoneType' object is not callable" for both LQR and MPC, and help me to check and rewrite the wrong part as I can not output the figure shown as an example as follows:
The codes are:
import numpy as np import cvxpy as cp def Setup_Derivative(param): ## this function is optional ## TODO return None # TODO def Fun_Jac_dt(x, u, param): L_f = param["L_r"] L_r = param["L_f"] h = param["h"] psi = x[2] v = x[3] delta = u[0] a = u[1] A = np.zeros((4, 4)) B = np.zeros((4, 2)) A[0, 0] = 1 A[0, 2] = -h*v*np.sin(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))) A[0, 3] = h*np.cos(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))) A[1, 1] = 1 A[1, 2] = -h*v*np.cos(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))) A[1, 3] = h*np.sin(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))) A[2, 2] = 1 A[2, 3] = (h*np.arctan(delta)/(((L_r**2*delta**np.arctan(delta)**2)/(L_f+L_r)**2 + 1)**(1/2)*(L_f+L_r))) A[3, 3] = 1 B[0, 1] = -(h*L_r*v*np.sin(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))))/((delta**2 + 1)*((L_r**2*np.arctan(delta)**2)/(L_f+L_r)**2+1)*(L_f+L_r)) B[1, 1] = (h*L_r*v*np.cos(psi+np.arctan((L_r*np.arctan(delta))/(L_f+L_r))))/((delta**2 + 1)*((L_r**2*np.arctan(delta)**2)/(L_f+L_r)**2+1)*(L_f+L_r)) B[2, 1] = (h*v)/((delta**2 + 1)*((L_r**2*np.arctan(delta)**2)/(L_f+L_r)**2+1)**(3/2)*(L_f+L_r)) B[3, 0] = h return [A, B] def Student_Controller_LQR(x_bar, u_bar, x0, Fun_Jac_dt, param): dim_state = x_bar.shape[1] dim_ctrl = u_bar.shape[1] n_u = u_bar.shape[0] * u_bar.shape[1] n_x = x_bar.shape[0] * x_bar.shape[1] n_var = n_u + n_x n_eq = x_bar.shape[1] * u_bar.shape[0] n_ieq = u_bar.shape[1] * u_bar.shape[0] # Define the parameters Q = np.eye(4) Q[0, 0] = 10000 Q[3, 3] = 10000 Q[1, 1] = 200000 Q[2, 2] = 10000 R = np.eye(2) R[0, 0] = 9000 R[1, 1] = 7000 Pt = np.eye(4) * 10000 Pt = np.eye(4) * 10 #Define the cost function np.random.seed(1) P = np.zeros((n_var, n_var)) for k in range(u_bar.shape[0]): P[k * x_bar.shape[1]:(k+1) * x_bar.shape[1], k * x_bar.shape[1]:(k+1) * x_bar.shape[1]] = Q P[n_x + k * u_bar.shape[1]:n_x + (k+1) * u_bar.shape[1], n_x + k * u_bar.shape[1]:n_x + (k+1) * u_bar.shape[1]] = R P[n_x - x_bar.shape[1]:n_x, n_x - x_bar.shape[1]:n_x] = Pt P = (P + P.T) / 2 q = np.zeros((n_var, 1)) # Define the constraints A = np.zeros((n_eq, n_var)) b = np.zeros(n_eq) G = np.zeros((n_ieq, n_var)) ub = np.zeros(n_ieq) lb = np.zeros(n_ieq) u_lb = param["delta_lim"] u_ub = param["a_lim"] for k in range(u_bar.shape[0]): AB = Fun_Jac_dt(x_bar[k,:], u_bar[k,:], param) A[k*dim_state:(k+1)*dim_state, dim_state:(k+1)*dim_state] = AB[0] A[k*dim_state:(k+1)*dim_state, (k+1)*dim_state:(k+2)*dim_state] = -np.eye(dim_state) A[k*dim_state:(k+1)*dim_state, n_x + k*dim_ctrl:n_x + (k+1)*dim_ctrl] = AB[1] G[k*dim_ctrl:(k+1)*dim_ctrl, n_x + k*dim_ctrl:n_x + (k+1)*dim_ctrl] = np.eye(dim_ctrl) ub[k*dim_ctrl:(k+1)*dim_ctrl] = u_ub - u_bar[k,:] lb[k*dim_ctrl:(k+1)*dim_ctrl] = u_lb - u_bar[k,:] # Define and solve the CVXPY problem x = cp.Variable(n_var) cons = [A @ x == b, x[0:dim_state] == x0 - x_bar[0, :]] prob = cp.Problem(cp.Minimize((1/2)*cp.quad_form(x, P) + q.T @ x), cons) prob.solve(verbose=False, max_iter = 10000) return (x.value[n_x:n_x + dim_ctrl] + u_bar[0, :]) def Student_Controller_CMPC(x_bar, u_bar, x0, Fun_Jac_dt, param): dim_state = u_bar.shape[1] dim_ctrl = x_bar.shape[1] n_u = u_bar.shape[0] * u_bar.shape[1] n_x = x_bar.shape[0] * x_bar.shape[1] n_var = n_u + n_x n_eq = x_bar.shape[0] * u_bar.shape[1] n_ieq = u_bar.shape[1] * x_bar.shape[1] # Define the parameters Pt = np.eye(4) * 700 Q = np.eye(4) * 100 R = np.eye(2) * 200000 # Define the cost funcgion np.random.seed(1) P = np.zeros((n_var, n_var)) for k in range(u_bar.shape[0]): P[k * x_bar.shape[1]:(k+1) * x_bar.shape[1], k * x_bar.shape[1]:(k+1) * x_bar.shape[1]] = Q P[n_x + k * u_bar.shape[1]:n_x + (k+1) * u_bar.shape[1], n_x + k * u_bar.shape[1]:n_x + (k+1) * u_bar.shape[1]] = R P[n_x - x_bar.shape[1]:n_x, n_x - x_bar.shape[1]:n_x] = Pt P = (P + P.T) / 2 q = np.zeros((n_var, 1)) # Define the constraints A = np.zeros((n_eq, n_var)) b = np.zeros(n_eq) G = np.zeros((n_ieq, n_var)) ub = np.zeros(n_ieq) lb = np.zeros(n_ieq) u_lb = param["delta_lim"] u_ub = param["a_lim"] for k in range(u_bar.shape[0]): AB = Fun_Jac_dt(x_bar[k,:], u_bar[k,:], param) A[k*dim_state:(k+1)*dim_state, dim_state:(k+1)*dim_state] = AB[0] A[k*dim_state:(k+1)*dim_state, (k+1)*dim_state:(k+2)*dim_state] = -np.eye(dim_state) A[k*dim_state:(k+1)*dim_state, n_x + k*dim_ctrl:n_x + (k+1)*dim_ctrl] = AB[1] G[k*dim_ctrl:(k+1)*dim_ctrl, n_x + k*dim_ctrl:n_x + (k+1)*dim_ctrl] = np.eye(dim_ctrl) ub[k*dim_ctrl:(k+1)*dim_ctrl] = u_ub - u_bar[k,:] lb[k*dim_ctrl:(k+1)*dim_ctrl] = u_lb - u_bar[k,:] # Define and solve the CVXPY problem. x = cp.Variable(n_var) cons = [G @ x <= ub, lb <= G @ x, A @ x == b, x[0:dim_state] == x0 - x_bar[0, :] ] prob = cp.Problem(cp.Minimize((1/2)*cp.quad_form(x, P) + q.T @ x), cons) prob.solve(verbose=False, max_iter = 10000) return [prob.objective.value, np.reshape(x.value[n_x:], u_bar.shape) + u_bar ]And the requirements are:
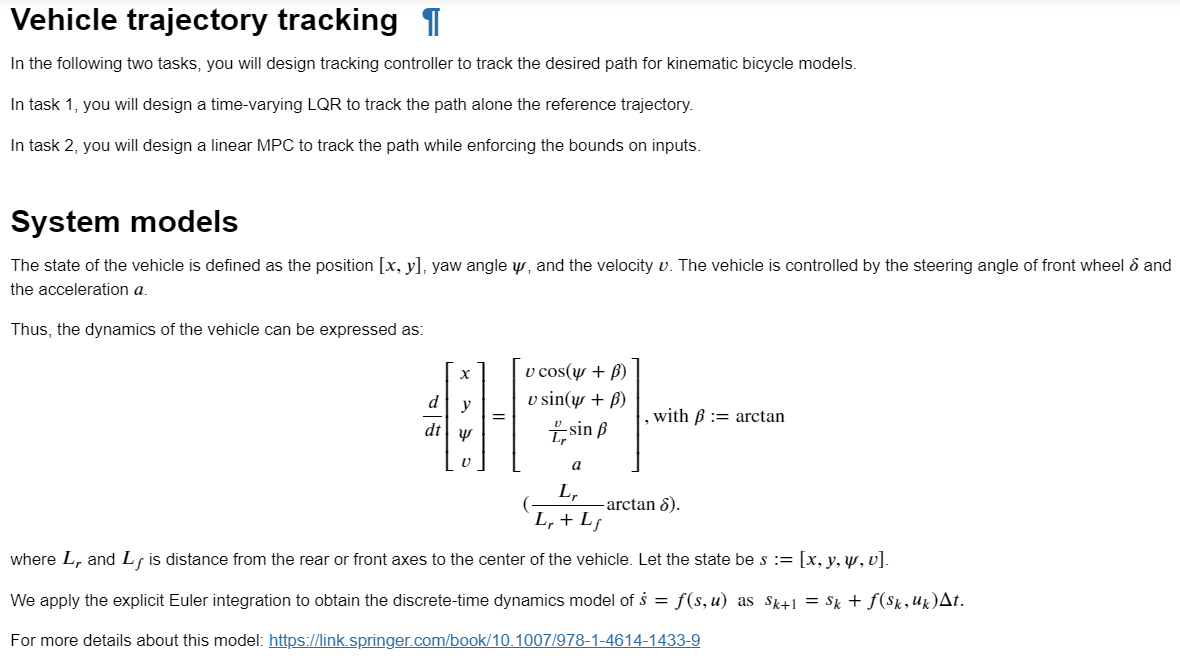
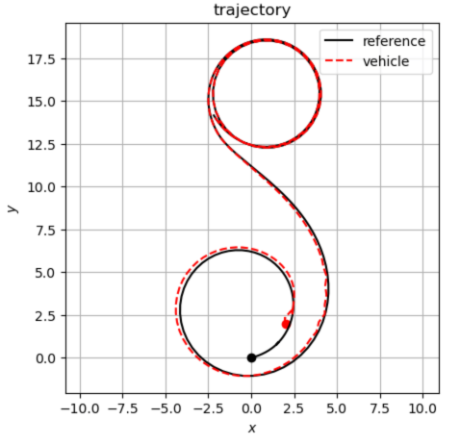
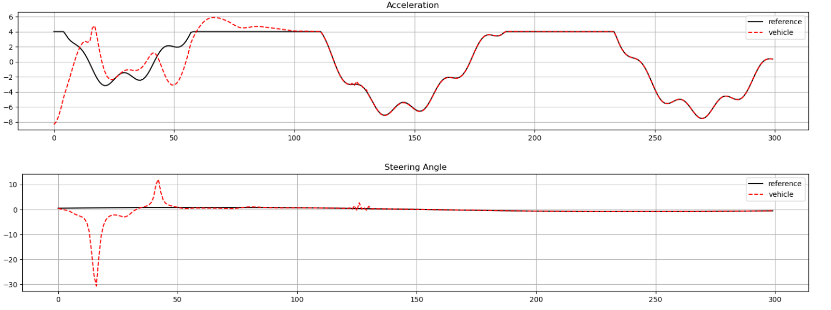
Vehicle trajectory tracking 1 In the following two tasks, you will design tracking controller to track the desired path for kinematic bicycle models. In task 1, you will design a time-varying LQR to track the path alone the reference trajectory. In task 2, you will design a linear MPC to track the path while enforcing the bounds on inputs. System models The state of the vehicle is defined as the position [x, y], yaw angle y, and the velocity v. The vehicle is controlled by the steering angle of front wheel & and the acceleration a. Thus, the dynamics of the vehicle can be expressed as: v cos(y + p) v sin(y + B) F- sin p a Lr Lp + L f where L, and Lf is distance from the rear or front axes to the center of the vehicle. Let the state be s := [x, y, w, v]. We apply the explicit Euler integration to obtain the discrete-time dynamics model of s = f(s, u) as Sk+1 = $k + f(sk, Uk)At. For more details about this model: https://link.springer.com/book/10.1007/978-1-4614-1433-9 d dt X y Y , with := arctan -arctan 8).
Step by Step Solution
There are 3 Steps involved in it
Step: 1
The skin friction coefficient Cf for a laminar boundary ...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Income Tax Fundamentals 2013
Authors: Gerald E. Whittenburg, Martha Altus Buller, Steven L Gill
31st Edition
1111972516, 978-1285586618, 1285586611, 978-1285613109, 978-1111972516