

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
Problem 6 B 9 R q Figure 6. Setup for a closest point algorithm Figure 6 above shows a point P moving in the
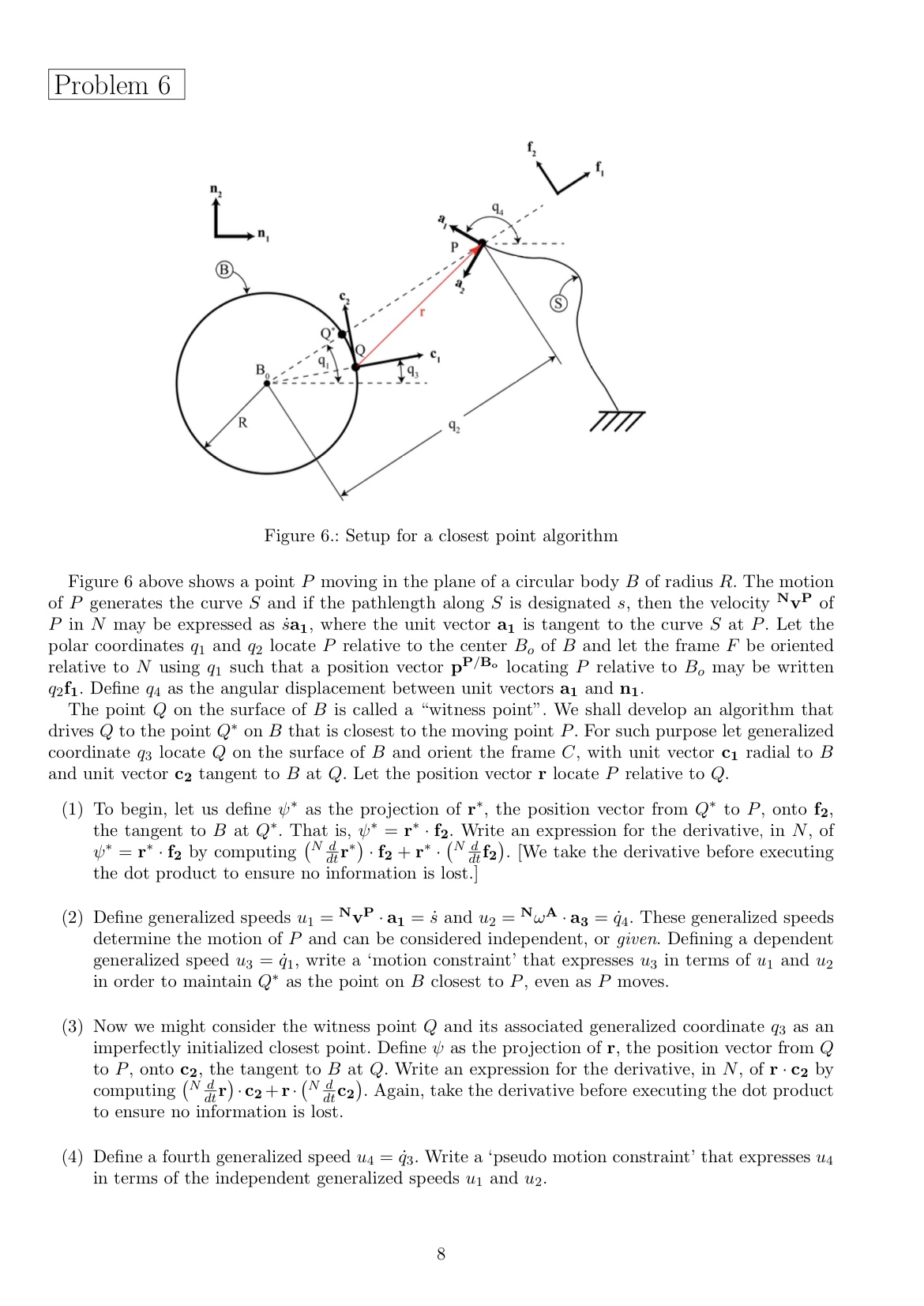
Problem 6 B 9 R q Figure 6. Setup for a closest point algorithm Figure 6 above shows a point P moving in the plane of a circular body B of radius R. The motion of P generates the curve S and if the pathlength along S is designated s, then the velocity NVP of P in N may be expressed as sa, where the unit vector a is tangent to the curve S at P. Let the polar coordinates q and q2 locate P relative to the center B, of B and let the frame F be oriented relative to N using q such that a position vector pP/B. locating P relative to Bo may be written 92f1. Define 94 as the angular displacement between unit vectors a and n. The point on the surface of B is called a "witness point". We shall develop an algorithm that drives to the point Q* on B that is closest to the moving point P. For such purpose let generalized coordinate q3 locate Q on the surface of B and orient the frame C, with unit vector c radial to B and unit vector c2 tangent to B at Q. Let the position vector r locate P relative to Q. (1) To begin, let us define * as the projection of r*, the position vector from Q* to P, onto f2, the tangent to B at Q*. That is, * = r* f2. Write an expression for the derivative, in N, of *r*f2 by computing (N *) f2 + r*. (N2). [We take the derivative before executing the dot product to ensure no information is lost.] (2) Define generalized speeds u = NvP a =s and u = a3 = 4. These generalized speeds determine the motion of P and can be considered independent, or given. Defining a dependent generalized speed u3 = 91, write a 'motion constraint' that expresses u3 in terms of u and u2 in order to maintain Q* as the point on B closest to P, even as P moves. (3) Now we might consider the witness point Q and its associated generalized coordinate q3 as an imperfectly initialized closest point. Define as the projection of r, the position vector from Q to P, onto c2, the tangent to B at Q. Write an expression for the derivative, in N, of r c2 by computing (r) C2+r. (N 4 C2). Again, take the derivative before executing the dot product to ensure no information is lost. (4) Define a fourth generalized speed u4 = 93. Write a 'pseudo motion constraint' that expresses u4 in terms of the independent generalized speeds u and u2. 8
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Fundamentals of Ethics for Scientists and Engineers
Authors: Edmund G. Seebauer, Robert L. Barry
1st Edition
9780195698480, 195134885, 195698487, 978-0195134889