

Question: Programming language: Python 4. Consider the 2-link robot arm in Figure 1 with link of length Li fixed at the origin and connected to the
Programming language: Python
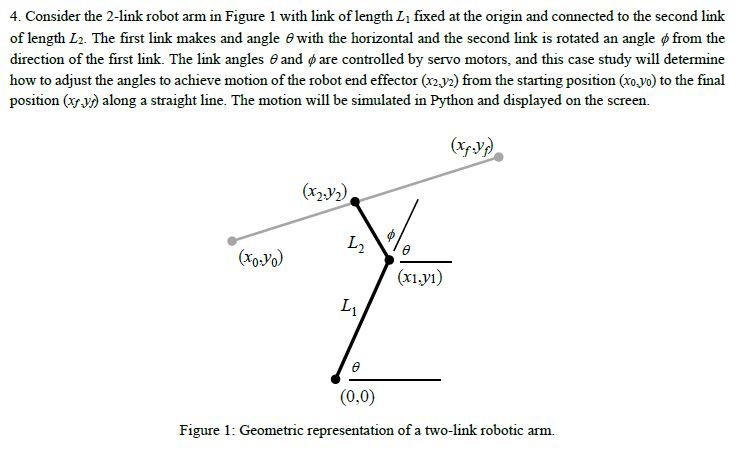
4. Consider the 2-link robot arm in Figure 1 with link of length Li fixed at the origin and connected to the second link of length L2. The first link makes and angle B with the horizontal and the second link is rotated an angle from the direction of the first link. The link angles 8 and o are controlled by servo motors, and this case study will determine how to adjust the angles to achieve motion of the robot end effector (x2,y2) from the starting position (x0,yo) to the final position (xy vs) along a straight line. The motion will be simulated in Python and displayed on the screen. (x,y) (x,y) (x0) (x1,y1) (0,0) Figure 1: Geometric representation of a two-link robotic arm. 4. Consider the 2-link robot arm in Figure 1 with link of length Li fixed at the origin and connected to the second link of length L2. The first link makes and angle B with the horizontal and the second link is rotated an angle from the direction of the first link. The link angles 8 and o are controlled by servo motors, and this case study will determine how to adjust the angles to achieve motion of the robot end effector (x2,y2) from the starting position (x0,yo) to the final position (xy vs) along a straight line. The motion will be simulated in Python and displayed on the screen. (x,y) (x,y) (x0) (x1,y1) (0,0) Figure 1: Geometric representation of a two-link robotic arm
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts