

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
[Q5: Please submit this sheet along with your answers with the drawing of frames] 06 14 16 05 25 04 03 1, 0, ,
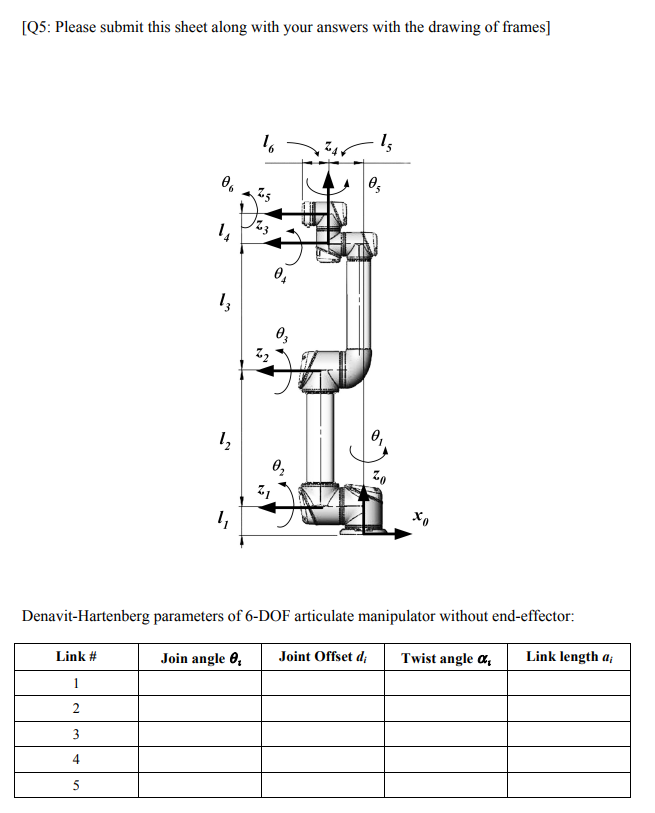
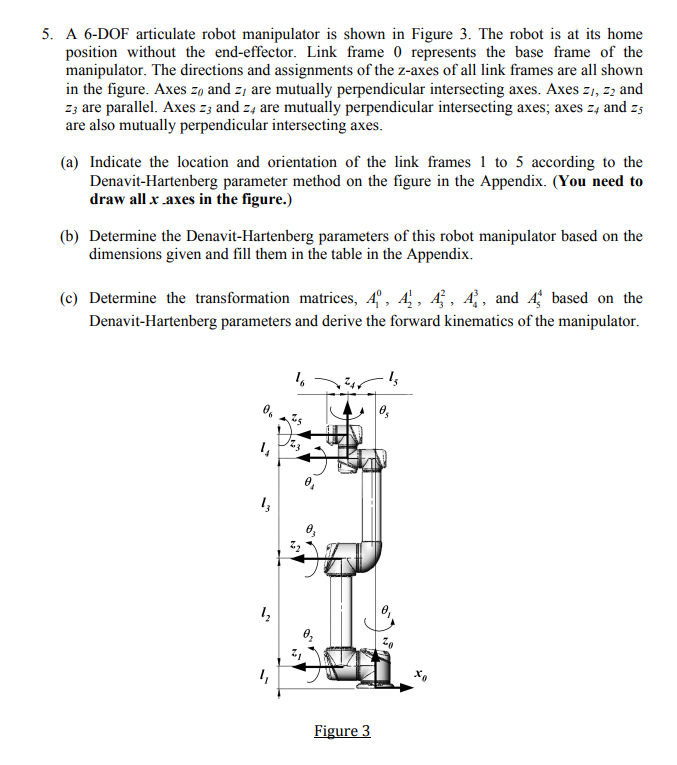
[Q5: Please submit this sheet along with your answers with the drawing of frames] 06 14 16 05 25 04 03 1, 0, , Denavit-Hartenberg parameters of 6-DOF articulate manipulator without end-effector: Link # Join angle 0, Joint Offset di Twist angle , Link length a 1 2 3 4 5 5. A 6-DOF articulate robot manipulator is shown in Figure 3. The robot is at its home position without the end-effector. Link frame 0 represents the base frame of the manipulator. The directions and assignments of the z-axes of all link frames are all shown in the figure. Axes zo and z, are mutually perpendicular intersecting axes. Axes Z1, Z2 and z3 are parallel. Axes z3 and 24 are mutually perpendicular intersecting axes; axes z4 and z5 are also mutually perpendicular intersecting axes. (a) Indicate the location and orientation of the link frames 1 to 5 according to the Denavit-Hartenberg parameter method on the figure in the Appendix. (You need to draw all x axes in the figure.) (b) Determine the Denavit-Hartenberg parameters of this robot manipulator based on the dimensions given and fill them in the table in the Appendix. (c) Determine the transformation matrices, 4, 4, 4, 4, and 4 based on the Denavit-Hartenberg parameters and derive the forward kinematics of the manipulator. . 13 03 Figure 3 13
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Numerical Methods For Engineers
Authors: Steven C. Chapra, Raymond P. Canale
5th Edition
978-0071244299, 0071244298