

Question
Question Four (20 marks) Use the disturbance-observer based approach to design a PID controller for the following system: G(s) = 2 s 2 1. (5
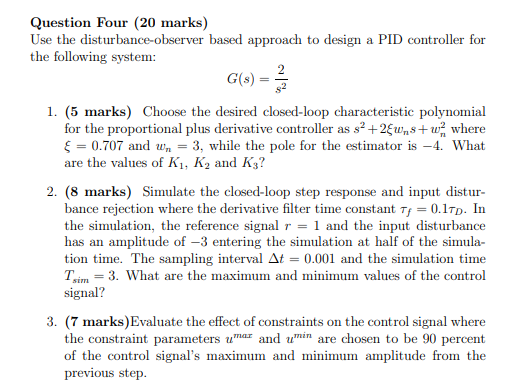
Question Four (20 marks) Use the disturbance-observer based approach to design a PID controller for the following system: G(s) = 2 s 2 1. (5 marks) Choose the desired closed-loop characteristic polynomial for the proportional plus derivative controller as s 2 +2wns+w 2 n where = 0.707 and wn = 3, while the pole for the estimator is 4. What are the values of K1, K2 and K3? 2. (8 marks) Simulate the closed-loop step response and input disturbance rejection where the derivative filter time constant f = 0.1D. In the simulation, the reference signal r = 1 and the input disturbance has an amplitude of 3 entering the simulation at half of the simulation time. The sampling interval t = 0.001 and the simulation time Tsim = 3. What are the maximum and minimum values of the control signal? 3. (7 marks)Evaluate the effect of constraints on the control signal where the constraint parameters u max and u min are chosen to be 90 percent of the control signals maximum and minimum amplitude from the previous step.
Question Four (20 marks) Use the disturbance-observer based approach to design a PID controller for the following system: 2 G(S) 1. (5 marks) Choose the desired closed-loop characteristic polynomial for the proportional plus derivative controller as s2 +2,5+u where $ = 0.707 and Ww = 3, while the pole for the estimator is -4. What are the values of K, K, and K3? 2. (8 marks) Simulate the closed-loop step response and input distur- bance rejection where the derivative filter time constant j = 0.17p. In the simulation, the reference signal r = 1 and the input disturbance has an amplitude of -3 entering the simulation at half of the simula- tion time. The sampling interval At = 0.001 and the simulation time Tsim = 3. What are the maximum and minimum values of the control signal? 3. (7 marks)Evaluate the effect of constraints on the control signal where the constraint parameters umar and min are chosen to be 90 percent of the control signal's maximum and minimum amplitude from the previous step. Question Four (20 marks) Use the disturbance-observer based approach to design a PID controller for the following system: 2 G(S) 1. (5 marks) Choose the desired closed-loop characteristic polynomial for the proportional plus derivative controller as s2 +2,5+u where $ = 0.707 and Ww = 3, while the pole for the estimator is -4. What are the values of K, K, and K3? 2. (8 marks) Simulate the closed-loop step response and input distur- bance rejection where the derivative filter time constant j = 0.17p. In the simulation, the reference signal r = 1 and the input disturbance has an amplitude of -3 entering the simulation at half of the simula- tion time. The sampling interval At = 0.001 and the simulation time Tsim = 3. What are the maximum and minimum values of the control signal? 3. (7 marks)Evaluate the effect of constraints on the control signal where the constraint parameters umar and min are chosen to be 90 percent of the control signal's maximum and minimum amplitude from the previous stepStep by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Financial Accounting
Authors: David Spiceland
6th Edition
1265889716, 978-1265889715