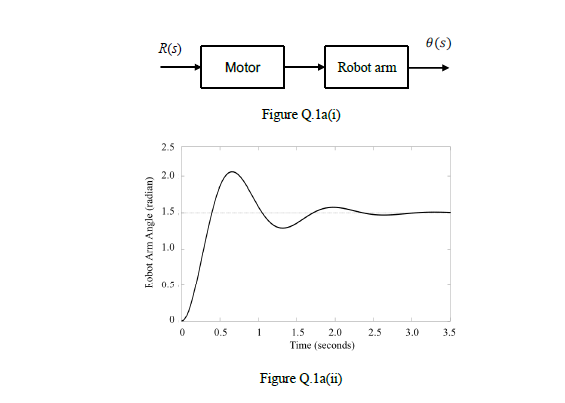
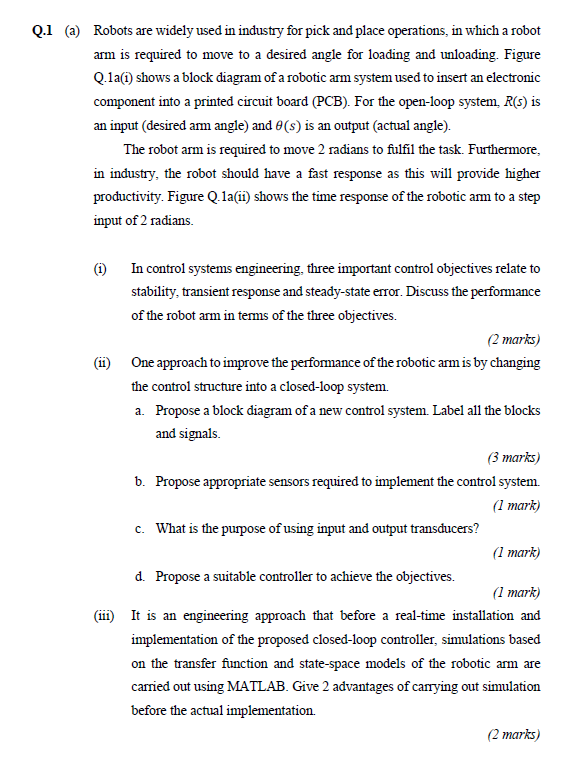
R(5) (s) Motor Robot arm Figure Q.1a(1) 2.5 2.0 1.5 Fobot Arm Angle (radian) 1.0 0.3 0 0 0.5 1 2.5 3.0 3.5 1.5 2.0 Time (seconds) Figure Q.1a(11) Q.1 (a) Robots are widely used in industry for pick and place operations, in which a robot arm is required to move to a desired angle for loading and unloading. Figure Q.1a(1) shows a block diagram of a robotic arm system used to insert an electronic component into a printed circuit board (PCB). For the open-loop system. R(5) is an input desired amm angle) and e(s) is an output (actual angle). The robot arm is required to move 2 radians to fulfil the task. Furthermore, in industry, the robot should have a fast response as this will provide higher productivity. Figure Q.1a(11) shows the time response of the robotic arm to a step input of 2 radians. (1) In control systems engineering, three important control objectives relate to stability, transient response and steady-state error. Discuss the performance of the robot arm in terms of the three objectives. (2 marks) (11) One approach to improve the performance of the robotic arm is by changing the control structure into a closed-loop system. a. Propose a block diagram of a new control system. Label all the blocks and signals. (3 marks) b. Propose appropriate sensors required to implement the control system. (1 mark) c. What is the purpose of using input and output transducers? (1 mark) d. Propose a suitable controller to achieve the objectives. (1 mark) (iii) It is an engineering approach that before a real-time installation and implementation of the proposed closed-loop controller, simulations based on the transfer function and state-space models of the robotic arm are carried out using MATLAB. Give 2 advantages of carrying out simulation before the actual implementation. (2 marks) R(5) (s) Motor Robot arm Figure Q.1a(1) 2.5 2.0 1.5 Fobot Arm Angle (radian) 1.0 0.3 0 0 0.5 1 2.5 3.0 3.5 1.5 2.0 Time (seconds) Figure Q.1a(11) Q.1 (a) Robots are widely used in industry for pick and place operations, in which a robot arm is required to move to a desired angle for loading and unloading. Figure Q.1a(1) shows a block diagram of a robotic arm system used to insert an electronic component into a printed circuit board (PCB). For the open-loop system. R(5) is an input desired amm angle) and e(s) is an output (actual angle). The robot arm is required to move 2 radians to fulfil the task. Furthermore, in industry, the robot should have a fast response as this will provide higher productivity. Figure Q.1a(11) shows the time response of the robotic arm to a step input of 2 radians. (1) In control systems engineering, three important control objectives relate to stability, transient response and steady-state error. Discuss the performance of the robot arm in terms of the three objectives. (2 marks) (11) One approach to improve the performance of the robotic arm is by changing the control structure into a closed-loop system. a. Propose a block diagram of a new control system. Label all the blocks and signals. (3 marks) b. Propose appropriate sensors required to implement the control system. (1 mark) c. What is the purpose of using input and output transducers? (1 mark) d. Propose a suitable controller to achieve the objectives. (1 mark) (iii) It is an engineering approach that before a real-time installation and implementation of the proposed closed-loop controller, simulations based on the transfer function and state-space models of the robotic arm are carried out using MATLAB. Give 2 advantages of carrying out simulation before the actual implementation. (2 marks)