

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
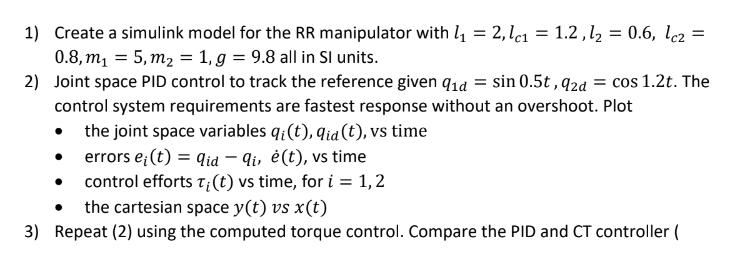
Robot Engineering question 1) Create a simulink model for the RR manipulator with l1=2,lc1=1.2,l2=0.6,lc2= 0.8,m1=5,m2=1,g=9.8 all in SI units. 2) Joint space PID control to
Robot Engineering question
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
New Trends In Databases And Information Systems Adbis 2019 Short Papers Workshops Bbigap Qauca Sembdm Simpda M2p Madeisd And Doctoral Consortium Bled Slovenia September 8 11 2019 Proceedings
Authors: Tatjana Welzer ,Johann Eder ,Vili Podgorelec ,Robert Wrembel ,Mirjana Ivanovic ,Johann Gamper ,Mikolaj Morzy ,Theodoros Tzouramanis ,Jerome Darmont
1st Edition
3030302776, 978-3030302771