

Question
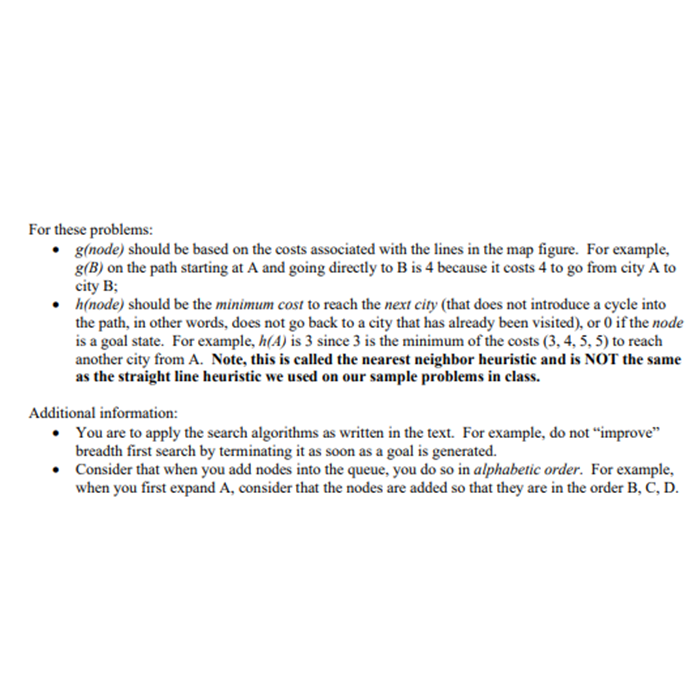
Route finding related problems using the below map: 1. Use the greedy search strategy. 2. Use the A* search strategy. 3. Use the hill climbing
Route finding related problems using the below map:
1. Use the greedy search strategy.
2. Use the A* search strategy.
3. Use the hill climbing search strategy.
4. Is the heuristic function you used above admissible? (Does the heuristic give you information that helps you efficiently move towards the goal?) Why or why not? Can you think of a better (more informed) heuristic function?
Please write search tree and do 1~5(based on search tree)
5. Discuss the relative characteristics of each of the search strategies for this particular problem. That is, state if the solution was optimal, and how many unnecessary nodes were expanded. Also explain in general, what is the best, expected, and worst case behavior of the algorithm. Also explain if certain assumptions lead to different behaviors.
6. A* search is essentially a uniform cost BFS heuristic search technique. What characteristics of the search space and of the heuristic function could make it better to use uniform cost BFS than to use A* search? (Hint: consider the total cost of searching to find a solution.)

Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Oracle9i Database Administrator Implementation And Administration
Authors: Carol McCullough-Dieter
1st Edition
0619159006, 978-0619159009