

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
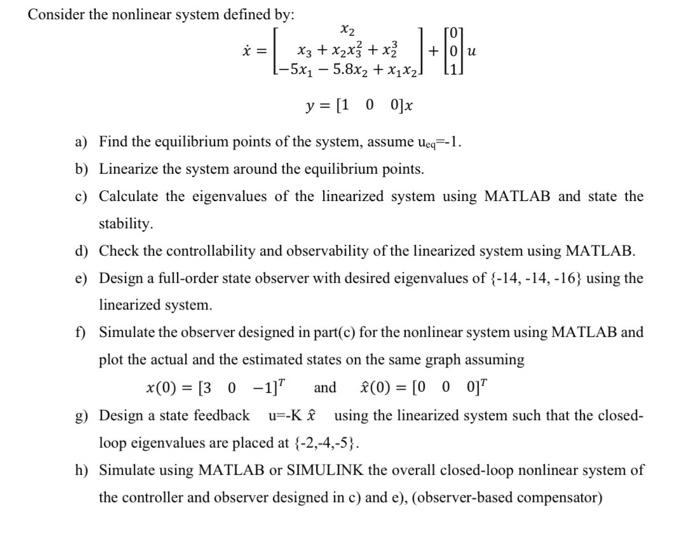
solve ( part h ) onlyyyyy These are the states vectors of the svsten A=[010;001:560];B=[0;0;1]; C=[100];D=0 Problem: Consider the nonlinear system defined by: x^=[x3+x2x32+x235x15.8x2+x1x2]+001uy=[100]x a)
solve ( part h ) onlyyyyy 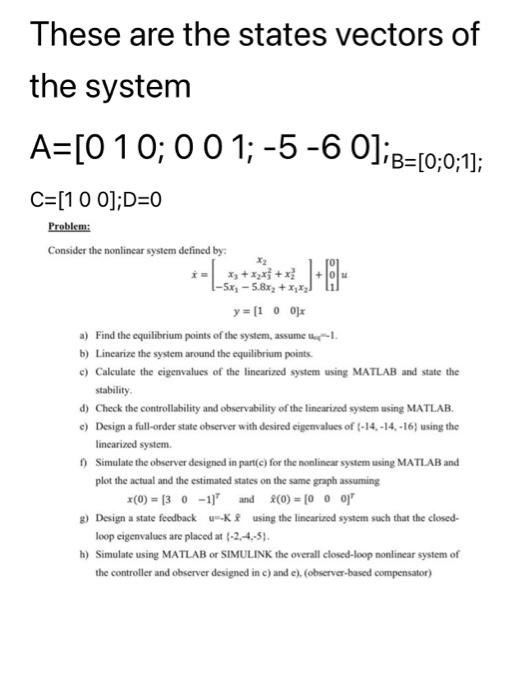
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Relational Database And SQL
Authors: Lucy Scott
3rd Edition
1087899699, 978-1087899695