

Answered step by step
Verified Expert Solution
Question
1 Approved Answer
The robot given in Figure-3 is supposed to be used for pick-place operations. The parameters of this robot, are given in the table below.
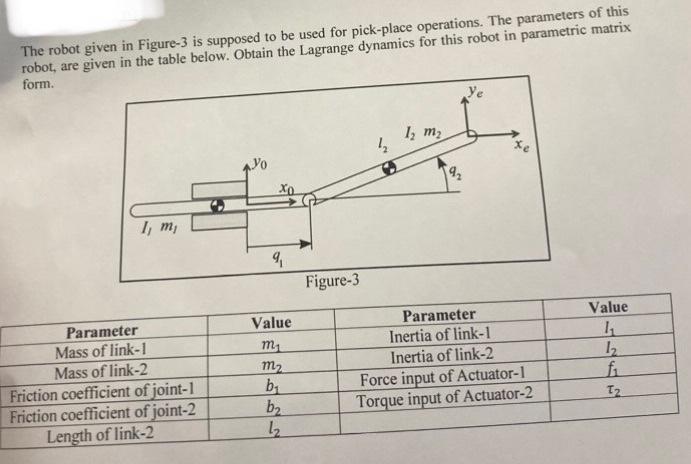
The robot given in Figure-3 is supposed to be used for pick-place operations. The parameters of this robot, are given in the table below. Obtain the Lagrange dynamics for this robot in parametric matrix form. 1, m, Parameter Mass of link-1 Mass of link-2 Friction coefficient of joint-1 Friction coefficient of joint-2 Length of link-2 Yo 9 Value m m b b 1 Figure-3 4 1 m 9 Ye Parameter Inertia of link-1 Inertia of link-2 Force input of Actuator-1 Torque input of Actuator-2 Value 4 1 fi T
Step by Step Solution
★★★★★
3.31 Rating (148 Votes )
There are 3 Steps involved in it
Step: 1
To obtain the Lagrange dynamics for the given robot in parametric matrix form we need to determine the kinetic energy T and potential energy V of the system and then apply the Lagranges equation to de...
Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Accounting Principles
Authors: Jerry J. Weygandt, Donald E. Kieso, Paul D. Kimmel, Barbara Trenholm, Valerie Warren, Lori Novak
7th Canadian Edition Volume 1
1119048508, 978-1119048503