

Question
The educational objective of this laboratory is to investigate the creation of custom IP to interface with the NIOS II on the Avalon Switch Fabric.
The educational objective of this laboratory is to investigate the creation of custom IP to interface with the NIOS II on the Avalon Switch Fabric. This lab is two parts, combined with Lab 5. Lab 4 focuses on the creation of the core, and Lab 5 on the software interfacing with the component.
Technical Objective
The technical objective of this laboratory is to design an embedded system for the Nios II processor and DE1-SoC development board that will control a servo motor to sweep between two angles.
The embedded system should contain a custom IP that creates the appropriate Pulse-Width Modulation (PWM) signal to sweep the servo-motors arm. The system also contains 8 switches for entering the start and stop angles, 2 pushbuttons for locking in the angles and 5 seven-segment displays for displaying the start and stop angles.
The system operates as follows:
The user inputs the start or minimum angle (> 45) in binary using the switches and locks it in
with KEY3.
The user inputs the stop or maximum angle (
with KEY2.
The C program passes the angle information to the servo controller.
The servo controller outputs a waveform to the servo motor that causes it to continuously
sweep from the minimum angle to the maximum angle and back again.
The angles can be changed at any time and in any order.
Servo Motor Background
The text below is taken from ServoCity.com
Servos are controlled by sending them a pulse with a variable width. The control wire of the servo motor accepts this pulse. The parameters for this pulse are that it has a minimum pulse, a maximum pulse, and a constant period. A sample pulse is shown in Figure 1 below.
Figure 1: Sample Waveform for Servo Motor
The angle of rotation is determined by the duration of a pulse that is applied to the control wire. This is called Pulse Width Modulation. The servo expects to see a pulse every 20 ms. The length of the pulse will determine how far the motor turns. For example, a 1.5 ms pulse will make the motor turn to the 90 degree position (neutral position), the minimum width pulse will make the motor turn to the 45 degree position and the maximum width pulse will turn it to the 135 degree position.
When servos are commanded to move they will move to the position and hold that position. If an external force pushes against the servo while the servo is holding a position, the servo will resist moving out of that position. The maximum amount of force the servo can exert is the torque rating of the servo. Servos will not hold their position forever though; the position pulse must be repeated to instruct the servo to stay in position.
When a pulse is sent to a servo that is less than 1.5 ms the servo rotates to a position and holds its output shaft some number of degrees counterclockwise from the neutral point. When the pulse is wider than 1.5 ms the opposite occurs. The minimal width and the maximum width of pulse that will command the servo to turn to a valid position are functions of each servo. Different brands, and even different servos of the same brand, will have different maximum and minimums.
Figure 2: Servo Motor Pulse Width Timing Waveforms
Specifications for the HiTec HS-311 servo motor used in this lab can be found at the web address:
http://www.servocity.com/html/hs-311_standard.html.
*NOTE* To create delays in VHDL, use counters. The clock on the DE1-SoC board is 50 MHz which means it has a period of 20 ns. For a delay of 20 ms, the count would be 20E-3 x 50E6 = 1,000,000. Your C program will read the angles from the switches and will have to determine the correct number of counts to load into the IP for it to create the appropriate pulse width. For example, if the user inputs 90 degrees, the C program will load 1.5E-3 x 50E6 = 75,000 into the IP. Using basic algebra, you can create the equation for a line and use that to determine the counts for any angle.
IP Design
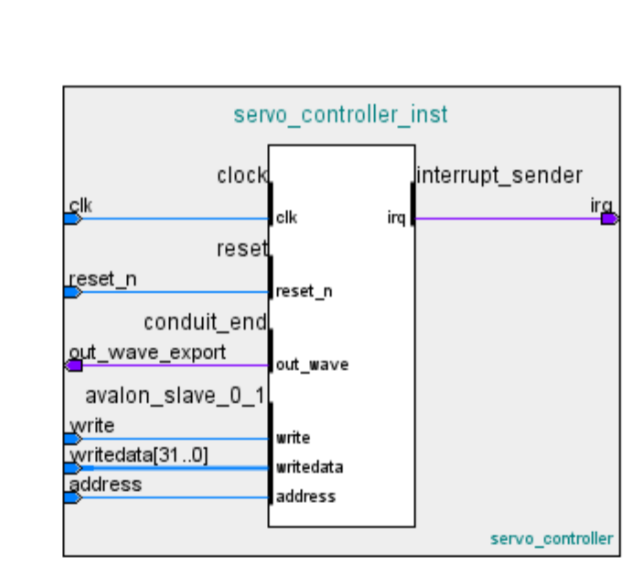
The servo controller IP will have the interfaces illustrated in figure 3. The counduit interface is necessary to send the output PWM signal out on a GPIO pin on the DE1-SoC board. The interrupt_sender interface is necessary for the controller to interrupt the NIOS II processor every time it reaches its min and max angle. The Avalon_slave_interface allows the C program to write the angle information to registers within the controller (see figure 4). Notice that the write signal is active high and the address signal is only 1 bit wide.
Figure3: Servo controller interface diagram
The controller should have 2 internal registers to store the angle information. These registers are 32 bits
wide. Since there are only 2 registers, only 1 address bit is needed to choose between the two. The
writedata is written to the addressed register when the write signal is active. Although it is customary to
clear registers to 0 upon reset, in this case the registers should be initialized to the counts for a 45 to
135 degree sweep ( X"0000C350" and X"000186A0", respectively).
Offset
0 Count for min angle pulsewidth
1 Count for max angle pulsewidth
Figure 4: Register map for servo controller
To create the output wave, a counter is needed to keep track of the 20ms period. While the current count is less than the angle count, the waveform is driven high. For the remainder of the period it is driven low. To enable a smooth sweep of the servo motor, the pulse width should start at the min angle width and gradually increment until it reaches the max angle width. Once it reaches the max angle width, it should gradually decrement until it reaches the min angle width. For simulation, the increment and decrement amount should be 1. For real time operation, you can experiment with that number to change the speed and smoothness of the sweep.
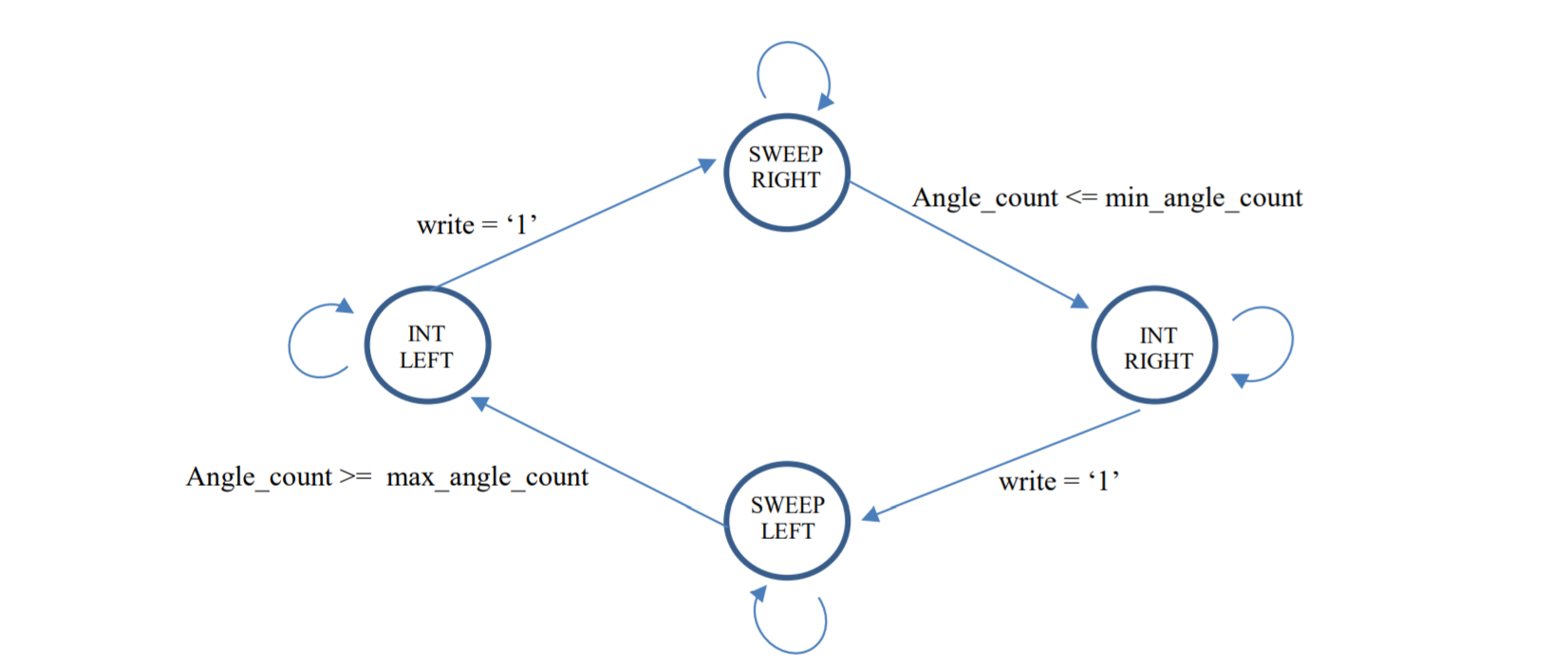
There is more than one way to write the code. You can keep signals that indicate the state of the system or use a finite state machine. Both have their advantages and disadvantages, but the advantage of using FSM is that the IRQ output is dependent only on the state. Below is a suggested state transition diagram. Please note that you are not required to use a state machine, nor are you required to follow the suggested state transition diagram. The design is completely up to you.
Notice that writing to one of the internal registers is the transition condition out of the interrupt states
and thus the action necessary for clearing the IRQ signal.
write = 1
INT LEFT
Angle_count
SWEEP RIGHT
SWEEP LEFT
Angle_count > max_angle_count
INT RIGHT
Figure 5: Possible State Transition Diagram for the servo controller
Software Design
The C code for this embedded system if very straight forward. Both the pushbutton and servo controller interrupts need to be registered and the pushbutton interrupts need to be enabled. There should also be an initial write to the servo controller setting its min angle to 45 degrees and its max angle to 135 degrees.
There will be two interrupt service routines. The ISR for the pushbuttons should change the variable for the min or max angle depending on which pushbutton was pushed. The ISR for the servo controller writes to both of the servo controllers registers. Remember you will be loading the registers with the number of counts necessary to create the pulse width for the specified angle.
The main loop of the program should display the min angle (in decimal) on HEX5 and HEX4 and display the max angle (in decimal) on HEX2-HEX0. If the angles are less than the number of digits allotted, just blank the display or front fill with 0. The displays should be updated every time the min and/or max angle changes. Remember that ISR needs to be in and out quickly. As such, do not update the displays in the ISR.
1. Write the VHDL file to implement the servo motor controller.
2. Write a test bench to test the servo motor controller.
Step by Step Solution
There are 3 Steps involved in it
Step: 1

Get Instant Access to Expert-Tailored Solutions
See step-by-step solutions with expert insights and AI powered tools for academic success
Step: 2

Step: 3
Ace Your Homework with AI
Get the answers you need in no time with our AI-driven, step-by-step assistance
Get Started
Mastering Apache Cassandra 3 X An Expert Guide To Improving Database Scalability And Availability Without Compromising Performance
Authors: Aaron Ploetz ,Tejaswi Malepati ,Nishant Neeraj
3rd Edition
1789131499, 978-1789131499